For the moment I'm kiteless. But for once that's no bad thing. The trade winds have been howling, it's been spitting or dumping rain depending on the time of day, and it's uncomfortably cold for someone who's not used to wearing anything but shorts and a T-shirt. Nope! Not missing the kites just yet.
But it's giving me time to research locations for the trip. The problem isn't finding places to photograph. Quite the opposite. I'm having a hard time narrowing things down. There are just so many places to photograph where we're going! Even the one trip out to the boonies is going to yield some outstanding opportunities to photograph old farm equipment, decaying buildings, and stream beds. And with the serendipitous nature of KAP, I can't wait to find out what I didn't know about, and what hidden bounties the camera will reveal.
The real issue is that this isn't a KAP trip. It's a family trip. We're visiting the mainland in order to spend time with family we haven't seen in over five years. I can't spend the whole trip grabbing a kite line and staring at the sky. Nor would I want to. And it's not just that I'd disappoint them. I want to see them, too!
But I hope there's some time to indulge, and maybe share in the madness. Most of the places I want to go should be fun for everyone else as well. There are parks, gardens, museums, libraries (yes, libraries are photogenic some of the time), at least two college campuses, and numerous pieces of outdoor sculpture. If the weather is right there's even the opportunity to go hiking in a stream bed that abounds with dinosaur footprint fossils. What kid doesn't like dinosaurs?
The part that's got me down isn't so much what I can look forward to during the trip. It's what awaits when I get back. I know I live in one of the more photogenic parts of the world. Small islands in the middle of the Pacific tend to be that way. But I see far fewer opportunities to do KAP here than I do in the middle of a city on the mainland. I hope this is just my perception of reality rather than reality itself. I can change my perception. I want to change my perception if it leads to new opportunities to take pictures from the air. But what if I'm right and the vistas really are limited?
I'm not egotistical enough to believe I'll run out of things to photograph. That's simply not the nature of things. But will I still feel challenged enough to want to? Will I start to describe my own pictures as "yet another example of..."? Scary thoughts for a photographer, even an amateur.
What I hope is that the opposite happens. I photograph the buildings, the parks, the stream beds, the gardens, and everything else I can find while we're there, but realize by leaving this island I've lost the opportunity to photograph subjects I'm not even consciously thinking about. When I return, I hope I've made a new list of places to go and photographs to take: places here, where I live. I hope the trip is revitalizing rather than depressing. Only time will tell.
In the meanwhile the wind is still howling, the rain is still spitting, and my KAP gear is still sitting in a box, hopefully well on its way.
Tom
Friday, December 14, 2007
Wednesday, December 12, 2007
Gracious Professionalism
I'm volunteering to be a mentor for a FIRST Robotics team this year. In one of the communications that came from the team coordinator was a definition:
Gracious Professionalism - Respect for others demonstrated through actions; Responsible use of knowledge; Act with integrity and sensitivity; Give and receive constructive criticism graciously and professionally.
I like this. The team coordinator said the team is adopting it as their credo. I certainly hope to see it while I'm mentoring, and would like to see all the folks involved take it with them once the FIRST competition is over. It's a fine credo to have when working with others, especially if they're trying to follow it, too.
I could wish people would take this idea and apply it outside the field of robotics. I could wish, but I know I'm not likely to have it come true. One of the forums I'm on has a great number of strong personalities on it. Unfortunately, two of them seem to go head-to-head a lot more often than is really necessary. Even more unfortunately, the last time this happened gloves were thrown down and personal attacks were exchanged. Worse than that, the personal attacks didn't come from the two people having this "discussion", but rather from other members of the forum who were chiming in to voice their own viewpoint in what had become a very personal issue.
Gracious professionalism? Nope. Not a bit of it. Closer to kids fighting on the playground about whose toy car was cooler. It made me sick.
In the past I've left forums because of behavior like that. Not in an effort to prove a point, but just because that's not how I choose to spend my time. A wise fella once said there are only so many hours before you reach room temperature: use them wisely. Reading other people's dirty laundry being aired in a forum is just not how I choose to use my hours.
But this time I really don't have a choice. I need the advice of the people on the forum, including the two at the heart of that "discussion". All personal differences aside, they're both far more knowledgeable in the field than I am ever likely to be.
I'm reminded of the disagreement between Sandage and deVacoleurs regarding the Hubble constant. Two experts who knew more about astronomy than I will ever know in my lifetime, both at each other's throats, and neither willing to admit that the other's calculations are well within their own error bars. Personal attacks were the least of the problems, and in one instance I'm led to understand they each literally took a swing at the other. Gracious professionalism? Not in the least.
So I'll stay on, but at a cost. When the cost gets to be too high, I guess I'll choose to spend my hours a different way and live without their expert advice. I just wish it didn't have to be so.
"And if wishes were horses we'd all be eating steak!" -- Jayne Cobb
Tom
P.S. To anyone from that forum who wound up reading this: Before posting any vitriolic comments, please re-read that definition above. Then re-read that quote at the end. If you truly must leave a nasty comment, I'd like a palomino. I won't even eat it.
Gracious Professionalism - Respect for others demonstrated through actions; Responsible use of knowledge; Act with integrity and sensitivity; Give and receive constructive criticism graciously and professionally.
I like this. The team coordinator said the team is adopting it as their credo. I certainly hope to see it while I'm mentoring, and would like to see all the folks involved take it with them once the FIRST competition is over. It's a fine credo to have when working with others, especially if they're trying to follow it, too.
I could wish people would take this idea and apply it outside the field of robotics. I could wish, but I know I'm not likely to have it come true. One of the forums I'm on has a great number of strong personalities on it. Unfortunately, two of them seem to go head-to-head a lot more often than is really necessary. Even more unfortunately, the last time this happened gloves were thrown down and personal attacks were exchanged. Worse than that, the personal attacks didn't come from the two people having this "discussion", but rather from other members of the forum who were chiming in to voice their own viewpoint in what had become a very personal issue.
Gracious professionalism? Nope. Not a bit of it. Closer to kids fighting on the playground about whose toy car was cooler. It made me sick.
In the past I've left forums because of behavior like that. Not in an effort to prove a point, but just because that's not how I choose to spend my time. A wise fella once said there are only so many hours before you reach room temperature: use them wisely. Reading other people's dirty laundry being aired in a forum is just not how I choose to use my hours.
But this time I really don't have a choice. I need the advice of the people on the forum, including the two at the heart of that "discussion". All personal differences aside, they're both far more knowledgeable in the field than I am ever likely to be.
I'm reminded of the disagreement between Sandage and deVacoleurs regarding the Hubble constant. Two experts who knew more about astronomy than I will ever know in my lifetime, both at each other's throats, and neither willing to admit that the other's calculations are well within their own error bars. Personal attacks were the least of the problems, and in one instance I'm led to understand they each literally took a swing at the other. Gracious professionalism? Not in the least.
So I'll stay on, but at a cost. When the cost gets to be too high, I guess I'll choose to spend my hours a different way and live without their expert advice. I just wish it didn't have to be so.
"And if wishes were horses we'd all be eating steak!" -- Jayne Cobb
Tom
P.S. To anyone from that forum who wound up reading this: Before posting any vitriolic comments, please re-read that definition above. Then re-read that quote at the end. If you truly must leave a nasty comment, I'd like a palomino. I won't even eat it.
Sunday, December 9, 2007
Last Flight Out
 We're heading to the mainland in a week and a half. I'm bringing KAP gear, but after a couple of horror stories I'm not planning to bring it on the plane. So I'm mailing it to my family. But that means at least a week of transit, so the box has to go in the mail no later than Tuesday.
We're heading to the mainland in a week and a half. I'm bringing KAP gear, but after a couple of horror stories I'm not planning to bring it on the plane. So I'm mailing it to my family. But that means at least a week of transit, so the box has to go in the mail no later than Tuesday.Considering the changes I've made in my rig in the past week, I wasn't comfortable shipping it until I had a chance to fly it at least once. With the weather pounding us over the last few days, I really wasn't sure it was going to happen. So Saturday morning I put my non-functional rig in my car to drive down to Kona so I could get a servo extension cable and actually plug in my shutter servo. The model shop was open, the cable was in stock, so after a couple of other errands, I went to the park.
Yet again I flew in the face of a storm. But this time, everything went right. I finally had a good KAP flight! It's been weeks! The changes to my rig worked beautifully, I got great stability, and the new shutter servo, though it jitters like crazy on the 6.0V battery, worked like a champ. The current capacity of the battery is good, and let me fly for well over an hour without even slowing down. I also got around to making a new charger cable for the NiMH battery packs, so this also heralds the end of the alligator-clip-on-bare-wire charging method. I'm stoked.
Sunday was a wash as we prepared for the trip. Lots of house cleaning, lots of last minute gotchas. I disassembled the rig this morning and boxed it up. I wound up using most of my stash of bubble wrap, but I'll re-use it for the return trip, so it's all good. I hope everything arrives ok!
Can't wait to get on the plane and follow my gear to the mainland.
Tom
Thursday, December 6, 2007
Slowing Down
I ran the idea of the SG90 servo by Brooks, and he came up with two reasons not to do it. First, the BBGG is designed for a standard servo frame, so getting the gears to work with a mini or micro servo will be tough at best and impossible at worst. Also, he's not convinced the compromise is worth the savings in weight. So I'm either going to swap to an S3003 and the BBGG (+45g for the BBGG, -23g for the S3003, for a net gain of about 20g) or I'm going to quit messing around with my pan axis and leave it alone for good.
The shutter servo still looks like a win. I need to make a new mounting bracket for it, but it should just drop right in. Only problem is I'm sick at the moment, so I'm not making parts in the shop. Typing is about all I'm good for.
We're also being hit with some pretty nasty weather. I was supposed to go to the summit today, but we got weathered out. Just as well, considering I'm sick. I just hope I'm well for the weekend so I can try the newer, lighter KAP rig. But for now conditions are perfect to brew up a pot of tea, snuggle down in a nice warm quilt, curl up with a good book, and...
Hack my lungs out.
Such is life. Egads I hope I get well by Saturday. It's been two weeks without a decent flight.
Tom
The shutter servo still looks like a win. I need to make a new mounting bracket for it, but it should just drop right in. Only problem is I'm sick at the moment, so I'm not making parts in the shop. Typing is about all I'm good for.
We're also being hit with some pretty nasty weather. I was supposed to go to the summit today, but we got weathered out. Just as well, considering I'm sick. I just hope I'm well for the weekend so I can try the newer, lighter KAP rig. But for now conditions are perfect to brew up a pot of tea, snuggle down in a nice warm quilt, curl up with a good book, and...
Hack my lungs out.
Such is life. Egads I hope I get well by Saturday. It's been two weeks without a decent flight.
Tom
Tuesday, December 4, 2007
Getting Lighter

The quest for a lighter KAP rig continues. I picked up a new gear set for the trashed S3003 servo from the local hobby shop, along with a 6V 2/3 AAA NiMH battery pack. The battery change alone shaves almost 60g off the rig. I also picked up some SG50 micro servos to use as shutter servos, which should knock another 30g off. That should bump my rig weight down from 700g to 610g, and should help the slight side-to-side imbalance I have at the moment. I hope to have the new hardware mounted in time for the weekend.
I also found the SG90 servo, a 9g mini-servo with pretty impressive torque numbers, might let me install a pan gear set from http://www.brooxes.com and potentially wind up with more available torque, close to the same weight as my existing setup, change the pan axis over to a solid steel bolt (which, after the pan servo mod fiasco would make me very very happy) and set my rig up for adding a KAPFeather from http://www.jonesairfoils.com when time and shop cash allows.
So my rig continues to evolve, I continue to shave weight, and maybe just maybe I'll be able to fly in Waipio Valley in the near future.
Tom
Tuesday, November 20, 2007
Sometimes You Feel More Like a Dork
But the feeling will pass...
I set up to modify my pan servo, this time carefully reading the docs that came with my BBKK. I chose to use a new servo, one that's 20g lighter than my current pan servo. I read the docs carefully! Use the 1" #4-40 flathead screw... flathead screw... there's no flathead screw in here! So I pulled one out of my stock drawers. Now use a #6 drill to open up the hole in the... #6? That won't clear a flathead #4 screw! I'll use a drill big enough. Don't go deeper than 0.250", ok... Drill drill THUNK...
Yeah, I drilled straight through the gear and knocked the splined shaft right off. One servo down. Looking back through the bag of parts I found a #4-40 pan head screw, which would easily go down a hole drilled with a #6 drill. >sigh< Sometimes it doesn't help to know all the technical names for various screw heads. (For what it's worth, a pan head screw is flattish, but it's flattish both on top and on bottom, whereas a flat head screw is flat on top and tapered at an 82 degree angle on bottom.)
With the proper screw and drill in hand, I moved the job over to the lathe where I have an indicator on the drilling tailstock. I shallowed up and went for an 0.140" depth. This sunk the screw and still left plenty of meat on the splined shaft. With everything back in place I re-balanced the servo, re-assembled my rig, and now have a properly trimmed out pan axis.
But I'm down a servo...
No matter, the nearest hobby shop has gear sets for the busted servo (an S3003), so I can get it back up and running for less than ten dollars.
In the meanwhile, 3000m of kite string showed up at the post office, so I need to get busy making winders. Should make for a fun weekend!
Tom
I set up to modify my pan servo, this time carefully reading the docs that came with my BBKK. I chose to use a new servo, one that's 20g lighter than my current pan servo. I read the docs carefully! Use the 1" #4-40 flathead screw... flathead screw... there's no flathead screw in here! So I pulled one out of my stock drawers. Now use a #6 drill to open up the hole in the... #6? That won't clear a flathead #4 screw! I'll use a drill big enough. Don't go deeper than 0.250", ok... Drill drill THUNK...
Yeah, I drilled straight through the gear and knocked the splined shaft right off. One servo down. Looking back through the bag of parts I found a #4-40 pan head screw, which would easily go down a hole drilled with a #6 drill. >sigh< Sometimes it doesn't help to know all the technical names for various screw heads. (For what it's worth, a pan head screw is flattish, but it's flattish both on top and on bottom, whereas a flat head screw is flat on top and tapered at an 82 degree angle on bottom.)
With the proper screw and drill in hand, I moved the job over to the lathe where I have an indicator on the drilling tailstock. I shallowed up and went for an 0.140" depth. This sunk the screw and still left plenty of meat on the splined shaft. With everything back in place I re-balanced the servo, re-assembled my rig, and now have a properly trimmed out pan axis.
But I'm down a servo...
No matter, the nearest hobby shop has gear sets for the busted servo (an S3003), so I can get it back up and running for less than ten dollars.
In the meanwhile, 3000m of kite string showed up at the post office, so I need to get busy making winders. Should make for a fun weekend!
Tom
Friday, November 16, 2007
Sometimes You Feel Like a Dork
And sometimes you wish you didn't. Ok, most of the time I wish I didn't. But I'm glad I got it out of the way before I really felt like a dork. Here's how it is:
I finally started posting pictures of my KAP rig to Flickr. Good thing, too. Brooks Leffler made a number of comments on various aspects of my rig. One concerned battery weight. I have a quad AA holder with four AA batteries in it. 110g. Brooks suggested replacing it with a quad 2/3 AAA NiMH pack. That drops the battery weight down by more than half. For a 700g rig, that's a lot.
Another area I'm trying to trim weight is the servos. I started with three Futaba S28 servos at 55g apiece. I replaced the shutter and tilt servos with Futaba S3003 servos, dropping those two to 34g. The plan now is to install a TowerPro SG50 as the shutter servo (5.5g), take the S3003 I have on the shutter now and move it to pan (55g drops to 34g) and dump my total shutter mass from 123g down to 73.5g. Between this and the battery mod, I can shave well over 110g off my rig's weight. A little more judicious trimming and I can get a 700g rig down to half a kilo. It may not sound like much, but given the kites I have it opens up a lot more wind range.
But the real kicker came later: I posted pictures of my Picavet, which is the thing the whole rig hangs from. I've never really felt comfortable with it because it hangs from a single gear on a servo. All 700g of it. There's plenty of thread engagement, but it's still just steel threaded into nylon that's holding things in place.
Brooks commented on the picture and pointed out that I'd utterly missed a major part of the construction manual for the BBKK: the part where the servo gear is modified so it has a #4-40 threaded screw installed with the head on the inside of the servo, so all the weight is being borne by a metal-on-nylon shoulder rather than metal-on-nylon threads. As he put it, it's about 1000% more secure than what I'm running now.
Which makes me feel a whole heckuva lot better about how my rig will be after I modify it tonight! Months of flying, and the thing has never let go. So with this mod I figure I can fly forever and it'll never let go. Yeeha!
But...
Dang, don't I feel like a dork! Brooks asked if I'd read the manual. Well yeah, I did. Mostly. Sort of. Except the part about that screw installation because it was confusing...
Cripes, but how many tech support analysts can tell stories like that one? "You wouldn't believe this guy! He didn't wear a grounding strap because he said it was 'confusing', and now he's blown $100k in electronics to ESD hell! What a jerk!"
Yep. That's me. I read the manual, and skipped the confusing parts...
Which is why, I guess, a friend gave me a poster many years ago. "Mistakes - It could be that the purpose of your life is only to serve as a warning to others."
Let ye be warned! Don't be like me!
The postscript to all this, though, is that my rig never fell, and now that I'm embarrassed but wiser, it never will.
Tom
I finally started posting pictures of my KAP rig to Flickr. Good thing, too. Brooks Leffler made a number of comments on various aspects of my rig. One concerned battery weight. I have a quad AA holder with four AA batteries in it. 110g. Brooks suggested replacing it with a quad 2/3 AAA NiMH pack. That drops the battery weight down by more than half. For a 700g rig, that's a lot.
Another area I'm trying to trim weight is the servos. I started with three Futaba S28 servos at 55g apiece. I replaced the shutter and tilt servos with Futaba S3003 servos, dropping those two to 34g. The plan now is to install a TowerPro SG50 as the shutter servo (5.5g), take the S3003 I have on the shutter now and move it to pan (55g drops to 34g) and dump my total shutter mass from 123g down to 73.5g. Between this and the battery mod, I can shave well over 110g off my rig's weight. A little more judicious trimming and I can get a 700g rig down to half a kilo. It may not sound like much, but given the kites I have it opens up a lot more wind range.
But the real kicker came later: I posted pictures of my Picavet, which is the thing the whole rig hangs from. I've never really felt comfortable with it because it hangs from a single gear on a servo. All 700g of it. There's plenty of thread engagement, but it's still just steel threaded into nylon that's holding things in place.
Brooks commented on the picture and pointed out that I'd utterly missed a major part of the construction manual for the BBKK: the part where the servo gear is modified so it has a #4-40 threaded screw installed with the head on the inside of the servo, so all the weight is being borne by a metal-on-nylon shoulder rather than metal-on-nylon threads. As he put it, it's about 1000% more secure than what I'm running now.
Which makes me feel a whole heckuva lot better about how my rig will be after I modify it tonight! Months of flying, and the thing has never let go. So with this mod I figure I can fly forever and it'll never let go. Yeeha!
But...
Dang, don't I feel like a dork! Brooks asked if I'd read the manual. Well yeah, I did. Mostly. Sort of. Except the part about that screw installation because it was confusing...
Cripes, but how many tech support analysts can tell stories like that one? "You wouldn't believe this guy! He didn't wear a grounding strap because he said it was 'confusing', and now he's blown $100k in electronics to ESD hell! What a jerk!"
Yep. That's me. I read the manual, and skipped the confusing parts...
Which is why, I guess, a friend gave me a poster many years ago. "Mistakes - It could be that the purpose of your life is only to serve as a warning to others."
Let ye be warned! Don't be like me!
The postscript to all this, though, is that my rig never fell, and now that I'm embarrassed but wiser, it never will.
Tom
Friday, November 9, 2007
Well and Cutting
I'm more or less healthy and hale, and should have a chance to make that mounting plate for my friend this weekend. Pictures as the thing comes off the mill.
On another note, I may have found a neat opportunity to fly my kites for science. (Did that really sound as bad as it felt when I typed it?) The idea is to fly an instrument package on my kite that will take differential temperature measurements across 10cm, 30cm, 100cm, and 1300cm distances using high speed, high-sensitivity microthermal probes, all the while recording meteorological data (temp, humidity, barometric pressure, etc.) as well as GPS location, and log it all to an SD card as quickly as I can make the hardware do its job. The end result will be a dataset that can be used to determine the contribution of the air at each altitude toward atmospheric seeing at the site. ("Seeing" is a term indicating how much stars twinkle, or get shifted around by the air between them and your telescope. Good sites have low seeing, rotten sites have high seeing.)
The advantage to knowing the answer to this is that you take care of seeing at different altitudes using different techniques. If most of the seeing is coming from 6km up, ground level adaptive optics won't do a whole lot to fix the problem. If most of the seeing is coming from the 0-500m regime, it will. (And if most of the seeing is coming from heat plumes inside the telescope dome itself, it's a whole 'nuther set of problems to be solved!)
Luckily this has been done, primarily with weather balloons. But balloons cost (upwards of $1000 for a balloon and a non-recoverable instrument package), and you don't get to fly them everywhere. If you need to sample kilometers of air column, you don't have much choice but to fly a balloon. But if you only need to sample 500m and below, a kite with a 100% recoverable instrument package starts to look attractive.
There's a lot that needs to happen between now and then. I've started my literature search, and I have a vague hand-waving idea of the differential temperature sensor design. But I have a long way to go between that and a deployable instrument package.
In any case, this is a fun one. And it might mean I get to fly my kites at work!
Tom
On another note, I may have found a neat opportunity to fly my kites for science. (Did that really sound as bad as it felt when I typed it?) The idea is to fly an instrument package on my kite that will take differential temperature measurements across 10cm, 30cm, 100cm, and 1300cm distances using high speed, high-sensitivity microthermal probes, all the while recording meteorological data (temp, humidity, barometric pressure, etc.) as well as GPS location, and log it all to an SD card as quickly as I can make the hardware do its job. The end result will be a dataset that can be used to determine the contribution of the air at each altitude toward atmospheric seeing at the site. ("Seeing" is a term indicating how much stars twinkle, or get shifted around by the air between them and your telescope. Good sites have low seeing, rotten sites have high seeing.)
The advantage to knowing the answer to this is that you take care of seeing at different altitudes using different techniques. If most of the seeing is coming from 6km up, ground level adaptive optics won't do a whole lot to fix the problem. If most of the seeing is coming from the 0-500m regime, it will. (And if most of the seeing is coming from heat plumes inside the telescope dome itself, it's a whole 'nuther set of problems to be solved!)
Luckily this has been done, primarily with weather balloons. But balloons cost (upwards of $1000 for a balloon and a non-recoverable instrument package), and you don't get to fly them everywhere. If you need to sample kilometers of air column, you don't have much choice but to fly a balloon. But if you only need to sample 500m and below, a kite with a 100% recoverable instrument package starts to look attractive.
There's a lot that needs to happen between now and then. I've started my literature search, and I have a vague hand-waving idea of the differential temperature sensor design. But I have a long way to go between that and a deployable instrument package.
In any case, this is a fun one. And it might mean I get to fly my kites at work!
Tom
Monday, November 5, 2007
That'll Stop Ya
I've been dodging a cold for weeks, but it looks like it finally caught up with me. So no electronics mounting plate for me today. I need to do some re-design on the plate to accommodate larger bolts, so the time will likely be put to good use. But it's still discouraging to be so close, and have to wait another day.
I did get some good news, though: The baseplate was put into service tonight, and my friend's quadracopter flew with a nice, steady hover at 38% throttle. So it's got power to spare, and the baseplate helped make the whole structure very rigid and controllable. It worked! So life's not all bad.
Also, my other friend started work on my 6' rokkaku kite today. She's extremely fast (and good!) with a sewing machine, but this is a new material, a new thread, and her first time making a kite. So I really don't know how things will work out. My job is comparatively simple: Cut spars to length, make some Delrin end-caps for them, and make a bridle. I'm really really looking forward to flying it once we're both done. I had an abortive KAP session in Waipi`o Valley a few weeks ago that I'd really love to get back to with the rokkaku. Its higher line angle should make for a completely different experience. Can't wait!
Now I just need to get well...
Tom
I did get some good news, though: The baseplate was put into service tonight, and my friend's quadracopter flew with a nice, steady hover at 38% throttle. So it's got power to spare, and the baseplate helped make the whole structure very rigid and controllable. It worked! So life's not all bad.
Also, my other friend started work on my 6' rokkaku kite today. She's extremely fast (and good!) with a sewing machine, but this is a new material, a new thread, and her first time making a kite. So I really don't know how things will work out. My job is comparatively simple: Cut spars to length, make some Delrin end-caps for them, and make a bridle. I'm really really looking forward to flying it once we're both done. I had an abortive KAP session in Waipi`o Valley a few weeks ago that I'd really love to get back to with the rokkaku. Its higher line angle should make for a completely different experience. Can't wait!
Now I just need to get well...
Tom
Parts Beget Parts

I knew it wouldn't end there.
No, seriously, I knew it wouldn't because the baseplate I made had no provision for mounting the electronics and sensors for the thing. That was on purpose. It's a double-decker design, and the electronics are supposed to go on top. So I'm designing a new plate to hold the MPU (for the moment a Pololu Robotics Orangutan controller) and provide mounting points for the 6DOF IMU and any sensors that are likely to be used during prototyping. I really don't know what those sensors might be, so I'm sticking a bunch of tapped and clear holes on the outer edge to make life easier. One of the pieces of equipment that's to be bolted down is a combination 5V and 3.3V regulator, so the plate is also designed to act like a heat sink.
And I know this isn't the end of it, either. The Orangutan is temporary, and will likely be replaced as more systems are added. But that's ok. The baseplate was about a two hour job running at about 50% the speed I intended, and this one should be considerably shorter.
In addition to the plate I'll need to make three Delrin standoffs between the Orangutan and the plate, as well as either four more of the black spar blocks or a central pillar. (I'm aiming for the central pillar... weighs less.)
In any case, I'm thoroughly enjoying myself. It's great to be designing and making stuff in the shop again. Aaaaaaahhhh...
Tom
Sunday, November 4, 2007
Making Chips (Finally!)
I finally made chips with the new setup. There were issues...
First and foremost, you can't leave a mill for over a year without adjusting its gibs. After two Z axis stalls, I found out the Z axis gibs were so tight it was like pulling teeth to get it to move. I think I damaged the Z axis nut. I'm not happy with myself. In the middle of cutting a part, I pulled the spindle off, removed the Z axis leadscrew assembly, and did general adjustments. It's now running smoothly.
I also remembered something from my last wanna-list: I need a cooling fan for my spindle motor! That's one I never got around to doing, and have now moved to the top of the list. A better cooling arrangement for the motor driver electronics would be nice, too, but not as critical.
In any case, I finally loaded an honest-to-goodness part program on the mill, touched off the material, and clicked the go button. It went. And except for the scare with the Z axis, it ran perfectly. After much hemming and hawing, I'm making parts again!
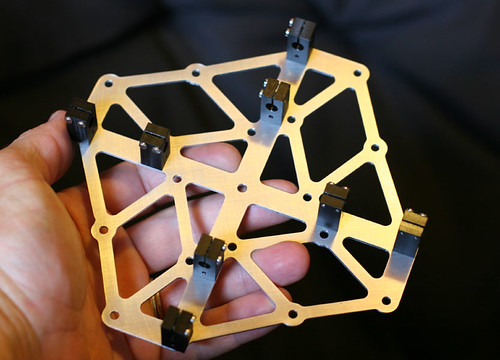
So what parts? A friend of mine is making a quadracopter. (It's worth a Google search if the term is unfamiliar). He's been prototyping it up to this point, but when one of his motor pods ripped off and went flying across the hall during a test run on some new props, it became apparent that some stuff, at least, had to go into production mode. So the motor pods have a nice new baseplate with over fifty millimeters of grab per spar, tie-down points for the batteries (big honkin' LiPoly batteries that need to be mounted firmly to something!), all sorts of good stuff.
The baseplate was a fun design, and a first for me for how I went from prototype to done:
I put the prototype design down on a desk, placed a 6" scale on top, and took a picture with a digital camera. I loaded the picture into Photoshop and cropped it to a nice and resolution to leave the 6" scale indicating proper inches (that is to say I got it scaled 1:1). Next the picture was loaded into Rhino3D as a background image, and scaled so it stayed 1:1. Finally, I drew outlines around the batteries, spars, etc. and turned them into a 3D model. Once things were cleaned up and re-arranged to make better use of the space available, I did a polar array around the center of the quadracopter and called that my pattern.
After drawing struts to connect all the bolt holes and mounting points, I made the heavy members 10mm wide and the lighter ones 4mm wide. A lot of filleting followed, and the design was done. In the end there were no lines parallel to any coordinate axis, and no two struts wound up being lined up in a single line. It's one funky looking part. But it works! And it all started with a digital photo of a prototype with something in the frame for scale.
It was really gratifying when I printed out a 1:1 of the design and had my friend take it home to compare against his existing parts. We both could've sworn I'd drawn the batteries too small. Turns out I hadn't. Everything was the right size, and he gave me the green light to cut parts. Now that the parts are cut and things are getting bolted together, I'm even more pleased.
Tom
Monday, October 29, 2007
EMC2 and Kite Supplies
I had a chance to use EMC2 to cut parts on my mill. Aside from still having problems getting the idea of touching off vs. homing through my thick skull, it was a good session. After a fair bit of experimentation, I get the idea of touching off vs. homing, I got semi-automatic toolchanges working with my CAD/CAM software (Vector CAD/CAM), and I even made some parts while I was at it (motor mount blocks for a friend's autonomous quadracopter). It was a good evening.
Tonight I've got a list of "wannas" loaded onto the flash drive I'm using to move files on and off of the mill computer. It's a shame, really, that I have to go that route. EMC2 runs on Ubuntu Linux, which is fully networked. But I can't get a cable out to my shop, and I can't afford wireless hardware at this point. Ah well. At some point it'll happen.
It's odd, along with all the items on my list like "install a spindle encoder so I can do CNC threading" and "finish designing and building the touch probe" I have one overwhelmingly important item: Lights! I have no lights in my shop anywhere near my mill. This is extremely hard on the eyes, and at times I've resorted to using flashlights. I need a lamp on my mill. BAD. Maybe I'll pick one up tonight when I swing by the hardware store.
In the meanwhile, the supplies for my rokkaku kite came in! I'm planning to build it using Gary Engval's plans. I ordered fiberglass spars rather than carbon fiber, more for economic reasons than anything else. But I can always replace them with carbon fiber spars at a later date. The sail will be bright green ripstop with matching green Dacron for the reinforcement patches. The webbing will all be black (I'm a traditionalist, and the spars are black anyway). I can't wait.
There are a number of flying spots on the Big Island I really haven't been able to fly with my Flowforms. Most of the spots on the Kona side are because of wind availability (little of it, and usually of the thermal variety). Most of the spots on the Hamakua side are because there are so many darned trees! Don't get me wrong. I love the trees here. But when you're flying on a beach with only thirty feet of sand between the water and the trees, and the trees are eighty feet tall, that's really not much space. The Flowforms have about a 35-55 degree flight angle, making narrow launch spot flying tough. The okkaku will have roughly a 75-85 degree flight angle, making such flying much much easier.
Another added benefit is that with higher line angle, you can lift the same weight with less line pull. Look at it this way: At a 30 degree line angle, you need four pounds of line pull to lift two pounds of payload (sin 30 = 0.500). At 90 degrees, two pounds of line pull will lift the same two pounds of payload. Not that you get kites flying 90 degrees straight up like an elevator, but kites like the rokkaku and delta get angles that are pretty darned close!
The disadvantage is that a rokkaku has a frame. Flowforms don't. I can stick two Flowforms, two line spools, a KAP rig, camera, transmitter, gloves, spare batteries, etc. into a backpack. The shortest spar on the rokkaku will be three feet long. It's not a backpack kind of kite. But that's ok! With a 32" kite bag and a spare hand, it gives me flight characteristics I haven't had before, and a big pretty green kite to go play with.
Hmmm... Since I've got lots of black Delrin in the shop these days, that might be a fun test for the EMC2 controlled mill: Chuck the Delrin in a drill chuck, use the lathe toolbar on the mill, and have it make nice, semi-spherical end caps for the spars!
Maybe these hobbies play better together than I thought...
Tom
Tonight I've got a list of "wannas" loaded onto the flash drive I'm using to move files on and off of the mill computer. It's a shame, really, that I have to go that route. EMC2 runs on Ubuntu Linux, which is fully networked. But I can't get a cable out to my shop, and I can't afford wireless hardware at this point. Ah well. At some point it'll happen.
It's odd, along with all the items on my list like "install a spindle encoder so I can do CNC threading" and "finish designing and building the touch probe" I have one overwhelmingly important item: Lights! I have no lights in my shop anywhere near my mill. This is extremely hard on the eyes, and at times I've resorted to using flashlights. I need a lamp on my mill. BAD. Maybe I'll pick one up tonight when I swing by the hardware store.
In the meanwhile, the supplies for my rokkaku kite came in! I'm planning to build it using Gary Engval's plans. I ordered fiberglass spars rather than carbon fiber, more for economic reasons than anything else. But I can always replace them with carbon fiber spars at a later date. The sail will be bright green ripstop with matching green Dacron for the reinforcement patches. The webbing will all be black (I'm a traditionalist, and the spars are black anyway). I can't wait.
There are a number of flying spots on the Big Island I really haven't been able to fly with my Flowforms. Most of the spots on the Kona side are because of wind availability (little of it, and usually of the thermal variety). Most of the spots on the Hamakua side are because there are so many darned trees! Don't get me wrong. I love the trees here. But when you're flying on a beach with only thirty feet of sand between the water and the trees, and the trees are eighty feet tall, that's really not much space. The Flowforms have about a 35-55 degree flight angle, making narrow launch spot flying tough. The okkaku will have roughly a 75-85 degree flight angle, making such flying much much easier.
Another added benefit is that with higher line angle, you can lift the same weight with less line pull. Look at it this way: At a 30 degree line angle, you need four pounds of line pull to lift two pounds of payload (sin 30 = 0.500). At 90 degrees, two pounds of line pull will lift the same two pounds of payload. Not that you get kites flying 90 degrees straight up like an elevator, but kites like the rokkaku and delta get angles that are pretty darned close!
The disadvantage is that a rokkaku has a frame. Flowforms don't. I can stick two Flowforms, two line spools, a KAP rig, camera, transmitter, gloves, spare batteries, etc. into a backpack. The shortest spar on the rokkaku will be three feet long. It's not a backpack kind of kite. But that's ok! With a 32" kite bag and a spare hand, it gives me flight characteristics I haven't had before, and a big pretty green kite to go play with.
Hmmm... Since I've got lots of black Delrin in the shop these days, that might be a fun test for the EMC2 controlled mill: Chuck the Delrin in a drill chuck, use the lathe toolbar on the mill, and have it make nice, semi-spherical end caps for the spars!
Maybe these hobbies play better together than I thought...
Tom
Wednesday, October 24, 2007
More fun with EMC2
So I ran that toolpath the other night. "I'll just run it in the air with no tool," I told myself. Sure... After I saw everything was running smoothly, of course, I loaded a 3/16" end mill, grabbed some aluminum scrap, touched off, and let it rip. Holy cow... I have to say, I'm impressed. The pulse stream coming from EMC2 is cleaner than anything that's ever driven my mill. No missed steps, no locked axes, no nothing.
But the resulting cavity was the wrong size. I more or less expected this. It's something you face every time you change software on a CNC mill. My mill gets 8000 steps per inch (0.000125" resolution), and EMC2's setup files defaulted to 4000. That's first on the list to fix.
I started pawing through the ample documentation (a huge change from the older EMC), and my jaw just about dropped. The change I needed to make was easy. So's adding home switches, which my controller is already set up for, though I haven't added the hardware itself to the mill. So's adding servo enable/disable, which my mill is completely set up for. Three easy changes that make it just like it was under TurboCNC.
Now for the fun part: You can give the mill a pre-defined location for tool changes. So you can use standard G-codes for tool changes, even on a mill that doesn't have an automatic tool changer on it. It will apparently move to the change location, pop up a window telling you which tool to change to, and wait for you to finish before starting the spindle back up. WOW! This I gotta try.
It also should soon have support for a tool height setter. This is basically a touch probe mounted to the mill table that faces up. When a new tool is loaded, it lowers to the tool setter until it touches, saves the Z height as an offset, and then goes back to work. Changing drill bits? No problem. The new length will be picked up. That's NICE.
I can also apparently just finish and plug in the digitizing probe I've had in the works for years. Digitizing a pre-existing part has apparently been in there for ages. Great!
The one that looks the toughest to set up is the spindle encoder, which would let me do CNC threading. I've seen a video of an EMC2-controlled lathe doing some really coarse threading, but not much on how to do it. (In case you're new to machining, "coarse threading" is typically harder than "fine threading" because you're cutting deeper, removing more material, and have to do all this with a slower spindle speed.) I have an indexer on my spindle, but no real rotary encoder. Since I built the indexer myself using a discrete IR interrupter, I can easily change out the optical plate it senses for one with more positions. So even if I can't use my setup as-is, I can certainly change things to suit. It'll happen!
One neat feature I saw was that it's got a feature for touching off on your workpiece. "Touching off" refers to finding one corner of the material and setting that one corner as your (0,0,0) coordinate point. On a manual mill this is typically done with an edge finder. An edge finder is a tool of a given diameter (mine's 0.200" in diameter) that reacts when it touches a workpiece. I've got an old-school edge finder that de-centers itself. But you can get electronic edge finders that light up when they touch off. In any case, the trick is to then compensate for the radius of the edge finder so you know where true zero is. In EMC2, apparently you can tell it the geometry of your edge finder, and when you're touching off you simply jog in an axis until it touches, click the "Touch Off" button for that axis, and it does the radius compensation for you. Slick!
Two features EMC2 has that TurboCNC didn't (at least the version I was using) are constant velocity contouring and cutter compensation.
CVC basically means long strings of short moves (which you get when you're cutting some contoured surface) are treated as a single move, and they're cut at one constant velocity.
In a CNC controller that doesn't support CVC, each move would be treated as a discrete entity, complete with acceleration from a dead stop, deceleration to a dead stop at the end, etc. So a contoured cut could take hours! I made some parts for work on an older system, and what should've been a two hour part took almost all day. It was a pain. I need to make spares of those parts, so I'll get to put CVC to the test in the very near future.
CC lets you change your mind about what tool you use without having to re-code the whole program. For example, if your controller knows you're using a 0.250" diameter mill, and that the material is off to the left, it'll displace the toolpath 0.125" to the right so that the cutting edge of the tool is in the right place. With CC, if you change to a 0.500" diameter tool and let the controller know, it'll displace the toolpath 0.250" to the right so that the cutting edge of the tool is still in the right place.
So far I haven't had much need for CC, but I'd like to see what I can do with it now that I know I have it. My CAM software supports CC, so it'll be neat to try.
Enough rambling for now. I need to start making chips!
Tom
But the resulting cavity was the wrong size. I more or less expected this. It's something you face every time you change software on a CNC mill. My mill gets 8000 steps per inch (0.000125" resolution), and EMC2's setup files defaulted to 4000. That's first on the list to fix.
I started pawing through the ample documentation (a huge change from the older EMC), and my jaw just about dropped. The change I needed to make was easy. So's adding home switches, which my controller is already set up for, though I haven't added the hardware itself to the mill. So's adding servo enable/disable, which my mill is completely set up for. Three easy changes that make it just like it was under TurboCNC.
Now for the fun part: You can give the mill a pre-defined location for tool changes. So you can use standard G-codes for tool changes, even on a mill that doesn't have an automatic tool changer on it. It will apparently move to the change location, pop up a window telling you which tool to change to, and wait for you to finish before starting the spindle back up. WOW! This I gotta try.
It also should soon have support for a tool height setter. This is basically a touch probe mounted to the mill table that faces up. When a new tool is loaded, it lowers to the tool setter until it touches, saves the Z height as an offset, and then goes back to work. Changing drill bits? No problem. The new length will be picked up. That's NICE.
I can also apparently just finish and plug in the digitizing probe I've had in the works for years. Digitizing a pre-existing part has apparently been in there for ages. Great!
The one that looks the toughest to set up is the spindle encoder, which would let me do CNC threading. I've seen a video of an EMC2-controlled lathe doing some really coarse threading, but not much on how to do it. (In case you're new to machining, "coarse threading" is typically harder than "fine threading" because you're cutting deeper, removing more material, and have to do all this with a slower spindle speed.) I have an indexer on my spindle, but no real rotary encoder. Since I built the indexer myself using a discrete IR interrupter, I can easily change out the optical plate it senses for one with more positions. So even if I can't use my setup as-is, I can certainly change things to suit. It'll happen!
One neat feature I saw was that it's got a feature for touching off on your workpiece. "Touching off" refers to finding one corner of the material and setting that one corner as your (0,0,0) coordinate point. On a manual mill this is typically done with an edge finder. An edge finder is a tool of a given diameter (mine's 0.200" in diameter) that reacts when it touches a workpiece. I've got an old-school edge finder that de-centers itself. But you can get electronic edge finders that light up when they touch off. In any case, the trick is to then compensate for the radius of the edge finder so you know where true zero is. In EMC2, apparently you can tell it the geometry of your edge finder, and when you're touching off you simply jog in an axis until it touches, click the "Touch Off" button for that axis, and it does the radius compensation for you. Slick!
Two features EMC2 has that TurboCNC didn't (at least the version I was using) are constant velocity contouring and cutter compensation.
CVC basically means long strings of short moves (which you get when you're cutting some contoured surface) are treated as a single move, and they're cut at one constant velocity.
In a CNC controller that doesn't support CVC, each move would be treated as a discrete entity, complete with acceleration from a dead stop, deceleration to a dead stop at the end, etc. So a contoured cut could take hours! I made some parts for work on an older system, and what should've been a two hour part took almost all day. It was a pain. I need to make spares of those parts, so I'll get to put CVC to the test in the very near future.
CC lets you change your mind about what tool you use without having to re-code the whole program. For example, if your controller knows you're using a 0.250" diameter mill, and that the material is off to the left, it'll displace the toolpath 0.125" to the right so that the cutting edge of the tool is in the right place. With CC, if you change to a 0.500" diameter tool and let the controller know, it'll displace the toolpath 0.250" to the right so that the cutting edge of the tool is still in the right place.
So far I haven't had much need for CC, but I'd like to see what I can do with it now that I know I have it. My CAM software supports CC, so it'll be neat to try.
Enough rambling for now. I need to start making chips!
Tom
Monday, October 22, 2007
Boot to the Head
Sometimes it takes a serious kick in the pants or a boot to the head to get off top dead center. And sometimes the things that should be painful really aren't in the end.
I've got a small benchtop CNC mill. It's an older machine, and runs bi-level chopper drivers on its stepper motors rather than a microstepper, which is more common these days. Because of this it's suffered from a couple of quirks, one of which is resonance at some speeds, which results in lost steps, destroyed parts, etc. Also, because my shop tools are more or less being operated on the basis of "if you can't afford it you can't do it", I don't buy a lot of new hardware for my mill. The computer that drives it is a curbside pickup special on computer recycling day, and up 'till now I've been running TurboCNC on a DOS installation.
It has been painful!!!
Don't get me wrong. TurboCNC is a good product, but it's not much fun running DOS for something that needs files to be moved around. I do my CAD work on a Windows XP machine. I have to get those files onto the CNC machine. With DOS that pretty much says floppy or nothing. I managed to get a DOS setup working that talked to USB flash drives, but you had to reboot the DOS machine in order to disconnect and connect your drive. And since the CNC machine is the only machine in my house with a floppy drive, it has not been fun. It's been so much of a pain I more or less quit using my mill out of frustration at how hard it is to design a part, tweak it, test it, change it, etc. and only then finally make it. It's been more trouble than it's worth. But it's what I had.
Until recently, anyway. I suffered yet another hard drive crash (shops are mean to computers), and realized I no longer even had the installer for the version of TCNC I was using. I hadn't used my mill in over a year because of the difficulties already mentioned, so I figured it was time to start fishing for a new program.
(As a quick aside, while thinking about what to do I disassembled the dead drive, a 2GB Samsung. I got two really nice flat round plates I can use as index plates or robot wheels, I got a brushless DC motor, some bearings, and a killer pair of fridge magnets!)
After a little hemming and hawing, I stuck a used 13GB drive in the machine, grabbed a copy of the EMC2 Brain Dead Install CD, and gave it a whirl. I am impressed! I had a bad experience with EMC in the Y2K era, so I had a lot of misgivings going into it. I have to say, though, my fears were utterly unfounded. This thing is impressive!
The developers of EMC2 seem to have fixed just about every EMC bug that drove me nuts back in the day, and in the exchange I get constant velocity contouring (CVC), much faster travel, a really nice interface that displays your toolpath before you commit to running it, cutter diameter offset, cutter length compensation, and all sorts of other goodies I haven't even begun to find out about yet. It's COOL!
In a little over half an hour I went from a dead mill and a dead computer with no hard drive to a really slick mill that'll do 50 inches per minute, whiz the rotary stage like a top, cut deep and clean, and let me use networking, file sharing, USB flash drives, etc. I'm in heaven!
So what's a feller to do? Make parts, of course! I don't have anything lined up, but this is serving as a perfect opportunity to re-learn my CAD/CAM software. That, too, has changed since I last used my mill. I draw things in Rhino3D these days, and generate toolpaths in Vector CAD/CAM. I whipped together a quickie to make a turner's cube on the mill, and will give it a try tonight in a couple of different materials. It'll test circular interpolation, backlash compensation, and all sorts of other things that more complex parts will need. In the end I'd love to make some of these in brass, throw them in the mass finishing setup, polish them to a mirror finish, and get them plated so they don't oxidize. Should be pretty!
What's down the road? In the short term I'd like to finish out the deck fittings for an RC sailboat, make a new backpack winder for my kite with fold-down handles, make a new chassis for my line follower and downhill racer robots, make a Delrin case for the Orangutan and for the AVR Dragon, make some gear cutters out of some O1 tool steel I've had lying around forever, and see what I feel like doing from there.
MAN it's nice to have my mill back! I can't wait to start playing.
Tom
I've got a small benchtop CNC mill. It's an older machine, and runs bi-level chopper drivers on its stepper motors rather than a microstepper, which is more common these days. Because of this it's suffered from a couple of quirks, one of which is resonance at some speeds, which results in lost steps, destroyed parts, etc. Also, because my shop tools are more or less being operated on the basis of "if you can't afford it you can't do it", I don't buy a lot of new hardware for my mill. The computer that drives it is a curbside pickup special on computer recycling day, and up 'till now I've been running TurboCNC on a DOS installation.
It has been painful!!!
Don't get me wrong. TurboCNC is a good product, but it's not much fun running DOS for something that needs files to be moved around. I do my CAD work on a Windows XP machine. I have to get those files onto the CNC machine. With DOS that pretty much says floppy or nothing. I managed to get a DOS setup working that talked to USB flash drives, but you had to reboot the DOS machine in order to disconnect and connect your drive. And since the CNC machine is the only machine in my house with a floppy drive, it has not been fun. It's been so much of a pain I more or less quit using my mill out of frustration at how hard it is to design a part, tweak it, test it, change it, etc. and only then finally make it. It's been more trouble than it's worth. But it's what I had.
Until recently, anyway. I suffered yet another hard drive crash (shops are mean to computers), and realized I no longer even had the installer for the version of TCNC I was using. I hadn't used my mill in over a year because of the difficulties already mentioned, so I figured it was time to start fishing for a new program.
(As a quick aside, while thinking about what to do I disassembled the dead drive, a 2GB Samsung. I got two really nice flat round plates I can use as index plates or robot wheels, I got a brushless DC motor, some bearings, and a killer pair of fridge magnets!)
After a little hemming and hawing, I stuck a used 13GB drive in the machine, grabbed a copy of the EMC2 Brain Dead Install CD, and gave it a whirl. I am impressed! I had a bad experience with EMC in the Y2K era, so I had a lot of misgivings going into it. I have to say, though, my fears were utterly unfounded. This thing is impressive!
The developers of EMC2 seem to have fixed just about every EMC bug that drove me nuts back in the day, and in the exchange I get constant velocity contouring (CVC), much faster travel, a really nice interface that displays your toolpath before you commit to running it, cutter diameter offset, cutter length compensation, and all sorts of other goodies I haven't even begun to find out about yet. It's COOL!
In a little over half an hour I went from a dead mill and a dead computer with no hard drive to a really slick mill that'll do 50 inches per minute, whiz the rotary stage like a top, cut deep and clean, and let me use networking, file sharing, USB flash drives, etc. I'm in heaven!
So what's a feller to do? Make parts, of course! I don't have anything lined up, but this is serving as a perfect opportunity to re-learn my CAD/CAM software. That, too, has changed since I last used my mill. I draw things in Rhino3D these days, and generate toolpaths in Vector CAD/CAM. I whipped together a quickie to make a turner's cube on the mill, and will give it a try tonight in a couple of different materials. It'll test circular interpolation, backlash compensation, and all sorts of other things that more complex parts will need. In the end I'd love to make some of these in brass, throw them in the mass finishing setup, polish them to a mirror finish, and get them plated so they don't oxidize. Should be pretty!
What's down the road? In the short term I'd like to finish out the deck fittings for an RC sailboat, make a new backpack winder for my kite with fold-down handles, make a new chassis for my line follower and downhill racer robots, make a Delrin case for the Orangutan and for the AVR Dragon, make some gear cutters out of some O1 tool steel I've had lying around forever, and see what I feel like doing from there.
MAN it's nice to have my mill back! I can't wait to start playing.
Tom
Thursday, October 4, 2007
Taking Time
I'm back to making parts at work. The past two weeks I've been designing and making parts for a temporary instrument. It's only likely to be used a handful of times, but its purpose is to demonstrate whether a particular idea works. So the results from the experiment could steer the course for future instrument development. It's been a fun project.
Today I made a part for a completely different instrument, one of our permanent ones. Every time it's taken down and set back up, there's an alignment that needs to be done to better than 0.7 microns. (Yeah, better than the wavelength of red light...) Oddly enough, the instrument had no facility for making this adjustment! The "proper" method was to knock a mirror into position, then fine tune it with the tension on the clamping screws. Ergh...
We've been kicking ideas around for a while, and a couple of attempts have been made, none all that successful. But today I took the drawings for the latest design and parked myself out in the shop. It was a good day.
The part's basically a ring with three clear holes and three threaded holes in the front face. So far so good. Some time on the lathe making all the different profiles on the part and some drill work on the mill, and the basics were done. For the next trick, it required four holes spotted, drilled, and tapped, at a 38 degree angle from horizontal, all around the periphery of the part.
It's really tempting to take shortcuts. Really tempting. But this time I resisted. Rather than file the bevels on the edges of the part, I used the cross-slide and did it right. Rather than try to C-clamp the thing down for drilling, I made a fixture and held it down with a screw. Rather than try to fudge that 38 degree angle, I made a gauge block and used that to set the part up in all four orientations. And rather than trust to fate with a center drill, I actually stuck to the drawings I'd made and spotted a 5mm flat at the location for each hole.
While I was at it I added some witness lines on top of the part so you could tell what axes the push-push screws were going to move the mirror. In the end it wound up actually looking nice!
But the proof is in the pudding. That instrument is coming off tomorrow, so we should have some opportunities to test it in the not-so-distant future. I hope it works. This has been a major thorn in my side. I have one of the other failed attempts sitting on my desk at the moment. It's a removable kinematic mount design that should've worked, but didn't because I took a shortcut with the geometry and screwed it up. No more short cuts! Take the time and get it right!
Tom
Today I made a part for a completely different instrument, one of our permanent ones. Every time it's taken down and set back up, there's an alignment that needs to be done to better than 0.7 microns. (Yeah, better than the wavelength of red light...) Oddly enough, the instrument had no facility for making this adjustment! The "proper" method was to knock a mirror into position, then fine tune it with the tension on the clamping screws. Ergh...
We've been kicking ideas around for a while, and a couple of attempts have been made, none all that successful. But today I took the drawings for the latest design and parked myself out in the shop. It was a good day.
The part's basically a ring with three clear holes and three threaded holes in the front face. So far so good. Some time on the lathe making all the different profiles on the part and some drill work on the mill, and the basics were done. For the next trick, it required four holes spotted, drilled, and tapped, at a 38 degree angle from horizontal, all around the periphery of the part.
It's really tempting to take shortcuts. Really tempting. But this time I resisted. Rather than file the bevels on the edges of the part, I used the cross-slide and did it right. Rather than try to C-clamp the thing down for drilling, I made a fixture and held it down with a screw. Rather than try to fudge that 38 degree angle, I made a gauge block and used that to set the part up in all four orientations. And rather than trust to fate with a center drill, I actually stuck to the drawings I'd made and spotted a 5mm flat at the location for each hole.
While I was at it I added some witness lines on top of the part so you could tell what axes the push-push screws were going to move the mirror. In the end it wound up actually looking nice!
But the proof is in the pudding. That instrument is coming off tomorrow, so we should have some opportunities to test it in the not-so-distant future. I hope it works. This has been a major thorn in my side. I have one of the other failed attempts sitting on my desk at the moment. It's a removable kinematic mount design that should've worked, but didn't because I took a shortcut with the geometry and screwed it up. No more short cuts! Take the time and get it right!
Tom
Wednesday, September 26, 2007
The Hobbies They Are A'Changin'
I volunteer for the Relay for Life, a fund-raiser for cancer treatment and research. I did this last year, and in addition to raising a good bit of funding we all had a blast. This year our team is doing a silent auction along with all the same fund-raising efforts we did last year. Our coordinator thought that to keep things interesting, the items should be hand-made or should be services that we, ourselves, would provide. Hey, what a perfect opportunity for someone with a home shop!
Seeing as how I used to make pens and pencils in the shop, I volunteered to do that. A few years back I got out of the pen and pencil business because I'd cranked out far too many as presents. I vowed that if I couldn't at least make it interesting (nice inlay work, mixing different woods, etc.) I simply wouldn't make them any more. I started doing a lot more creative setups, but they ate more time and more materials, and eventually I tapered off so I could spend my time doing other things like making parts for RC cars. I still have all my stuff, though, so I pulled it all out and started rummaging. Insert kits, wood blanks, even all my bushings were all there. I even had some tube sets already made up that never got assembled into pens. Great! Now all I needed to do was make them!
After a number of failed attempts at even getting out in the shop in the evening, I came to a realization: By the end of the day I'm absolutely zonked. Every time I tried to get up the energy to make pens after dinner, I realized I really didn't have it in me, and worried I might hurt myself in the process. Before you laugh, if you've seen the kinds of injuries you can get on a lathe by not having your wits about you, you'd realize this is a very real concern. So far I consider myself lucky, and I've nearly broken a finger when a three-jaw caught my hand. Yes, that's "lucky".
I got in a funk last night, figuring this was a sign of getting old. But my wife reminded me that I wake up at 5:30am on a normal morning (closer to 4:30am for an early-out morning) and she typically keeps me up 'till well after 10:00pm, so it probably has a lot less to do with getting old as it does just getting tired. This cheered me up, but there was still the matter of making pens and pencils when I'm exhausted. I just couldn't figure out how I'd get them done in time.
Then I realized I could charge my rig's batteries, check my gear, and offer my KAP services as a low-altitude aerial photography service. Yahoo!! So I printed up a little flyer I could put on the auction table, and let the coordinator know of the change in plans. I'm still going to crank out all the completed tube sets I've got, but it's going to be only a handful of pens rather than the dozen I was hoping for.
Oh how the hobbies have changed... Used to be I'd get home on a Wednesday night, give my shop buddy a call, and we'd get together out in my shop once the kids were in bed, about 9:00pm or so. We'd crank away 'till 3:00am, then we'd both get up for work the next morning. It was exhausting! It was exciting! My GOD we made a lot of pens and pencils (and rocket parts, and sailboat parts, and, and, and)! We used to eat, drink, breathe, live this stuff. And now? Now I'm trying to figure out how to use the tubes I've already made up, and not have to go make more. Have to? Boy have the times changed.
Maybe my wife is right. Maybe I'm just tired. Maybe I like the kite idea because kite flying is something that's typically done during the day when I'm awake and alert. (Well, that and it's fun as heck to do.) Maybe also it's that I now do machining as part of my daytime job. It's not the forbidden fruit it once was; it's part and parcel of daily life. Maybe I've simply moved on.
Or maybe I'm finally catching up on all the sleep I missed when I spent all those Wednesday nights doing shop-night... In that case I have a long way to go...
- Tom
Seeing as how I used to make pens and pencils in the shop, I volunteered to do that. A few years back I got out of the pen and pencil business because I'd cranked out far too many as presents. I vowed that if I couldn't at least make it interesting (nice inlay work, mixing different woods, etc.) I simply wouldn't make them any more. I started doing a lot more creative setups, but they ate more time and more materials, and eventually I tapered off so I could spend my time doing other things like making parts for RC cars. I still have all my stuff, though, so I pulled it all out and started rummaging. Insert kits, wood blanks, even all my bushings were all there. I even had some tube sets already made up that never got assembled into pens. Great! Now all I needed to do was make them!
After a number of failed attempts at even getting out in the shop in the evening, I came to a realization: By the end of the day I'm absolutely zonked. Every time I tried to get up the energy to make pens after dinner, I realized I really didn't have it in me, and worried I might hurt myself in the process. Before you laugh, if you've seen the kinds of injuries you can get on a lathe by not having your wits about you, you'd realize this is a very real concern. So far I consider myself lucky, and I've nearly broken a finger when a three-jaw caught my hand. Yes, that's "lucky".
I got in a funk last night, figuring this was a sign of getting old. But my wife reminded me that I wake up at 5:30am on a normal morning (closer to 4:30am for an early-out morning) and she typically keeps me up 'till well after 10:00pm, so it probably has a lot less to do with getting old as it does just getting tired. This cheered me up, but there was still the matter of making pens and pencils when I'm exhausted. I just couldn't figure out how I'd get them done in time.
Then I realized I could charge my rig's batteries, check my gear, and offer my KAP services as a low-altitude aerial photography service. Yahoo!! So I printed up a little flyer I could put on the auction table, and let the coordinator know of the change in plans. I'm still going to crank out all the completed tube sets I've got, but it's going to be only a handful of pens rather than the dozen I was hoping for.
Oh how the hobbies have changed... Used to be I'd get home on a Wednesday night, give my shop buddy a call, and we'd get together out in my shop once the kids were in bed, about 9:00pm or so. We'd crank away 'till 3:00am, then we'd both get up for work the next morning. It was exhausting! It was exciting! My GOD we made a lot of pens and pencils (and rocket parts, and sailboat parts, and, and, and)! We used to eat, drink, breathe, live this stuff. And now? Now I'm trying to figure out how to use the tubes I've already made up, and not have to go make more. Have to? Boy have the times changed.
Maybe my wife is right. Maybe I'm just tired. Maybe I like the kite idea because kite flying is something that's typically done during the day when I'm awake and alert. (Well, that and it's fun as heck to do.) Maybe also it's that I now do machining as part of my daytime job. It's not the forbidden fruit it once was; it's part and parcel of daily life. Maybe I've simply moved on.
Or maybe I'm finally catching up on all the sleep I missed when I spent all those Wednesday nights doing shop-night... In that case I have a long way to go...
- Tom
Thursday, September 20, 2007
ROV Teams - More Ideas
Pololu Robotics recently released a truly novel electronic speed controller (ESC) called the TReX. It will drive two bidirectional motors up to 13A continuous, 30A peak from 6V-16V and one unidirectional motor up to 15A continuous. It can be controlled through RC inputs, analog inputs, or through a serial port that has either RS-232 or TTL voltage levels available on it. The control mode can be changed on the fly, which makes it a truly unique device:
http://www.pololu.com/products/pololu/0777/
So here's the idea for teams building underwater ROVs for competition:
Several people have demonstrated that you can replace an RC transmitter antenna with a coax cable that can run underwater and terminate inside the dry box of an ROV. The dry box termination is basically to leave N inches of the coax core exposed as an antenna (N depends on your transmitter frequency, and needs to be wavelength-matched). The coax acts like a waveguide so the transmitter is essentially transmitting inside the dry box. Place the RC receiver nearby, but not in contact with the antenna coax. Voila, you now have RC feeding into your ROV.
Plug in two of the TReX speed controllers. Channels 1 and 2 drive the fwd/rev/turn thrusters. The TReX can be set up to do onboard channel mixing, so the primary joystick of the RC transmitter could be used as a fwd/rev/turn control, just like a video game. (For those who are slow to pick up on hints, by just like a video game I mean it gives your operator an interface they're already more than comfortable with, which means less seat time is required for them to become proficient in using the ROV!)
Channels 3 and 4 use the second TReX drives two vertical thrusters that can be used for ascent/descent/tilt. Considering how many ROVs wound up in a massive down-pitch after picking up a mission prop, having the ability to counter imbalances is a huge plus.
This leaves two aux outputs. Provided you are using at least a six channel radio, one could be used for a spring-loaded manipulator. The drive motor would have to fight the spring in order to close, but it would allow for pretty fine control over a manipulator.
An alternate idea would be to use the aux outputs to drive ballast pumps. Since there's always a chance an ROV challenge will involve lifting a payload, ballast tank designs may be more competitive than strictly thruster-based designs. This gives you a way to drive the pumps.
Now for Nifty Part #1: Your umbilical is now miniscule. Two 14-12ga wires carry DC power to the ROV (this is a requirement of some of the ROV competitions or I'd argue for on-board SLA batteries.) A single coax carries the RC signal to the ROV. A single coax can carry video back to the surface. You can get very narrow 75ohm coax that would do a dandy job of this, and not add much at all to the umbilical. The umbilical is much narrower and lighter weight than the typical umbilical, leading to less drag in the water and fewer issues in balancing it for neutral buoyancy.
Nifty Part #2: You now have a completely electronically controlled sub. If, at a later date, you decide to add an onboard microprocessor to the sub it's dead-easy. The TReX controllers can be daisy-chained (they're addressable, and treat the serial connection as a common bus), so a single UART micro would do the job. And since TTL connections are available you don't even need level shifters on board in order to drive the TReX controllers (though it supports that mode as well.)
Nifty Part #3: Already mentioned, but RC radios present a tried, true, and pretty common interface to the ROV. Any kid who's played video games or flown an RC helicopter or airplane will be more than familiar with the control layout. Since older AM proportional radios would do the job as well as a higher-end newer radio, a second-hand radio can be had for not much money off Ebay. I picked up a six-channel Futaba AM system for $45 at a garage sale years ago. They're even cheaper now.
Now let's talk cost, because none of this comes for free:
The TReX controllers retail for $99 each. Figure another $50-100 for a radio off of Ebay. Figure another $50-100 for an IP66-rated enclosure and a set of IP66-rated connectors such as the Bulgin Buccaneer connectors that are sold by Digikey. Voila. You now have two speed controllers mounted in a dry box with hermetic waterproof connectors to hook it up to your thrusters, and a complete user interface at the top.
I realize that tacking $250-400 onto the price of an underwater ROV may be more than most teams are in for. However at the last competition I saw there were teams that spent well into the thousands on their ROVs, so it's not out of the question. Considering how many teams were tripped up by their user interface, I'd consider $300 as money well-spent if it gives the team full proportional control over every thruster and high current outputs for driving additional devices like thrusters, pumps, and solenoid valves.
Tom
http://www.pololu.com/products/pololu/0777/
So here's the idea for teams building underwater ROVs for competition:
Several people have demonstrated that you can replace an RC transmitter antenna with a coax cable that can run underwater and terminate inside the dry box of an ROV. The dry box termination is basically to leave N inches of the coax core exposed as an antenna (N depends on your transmitter frequency, and needs to be wavelength-matched). The coax acts like a waveguide so the transmitter is essentially transmitting inside the dry box. Place the RC receiver nearby, but not in contact with the antenna coax. Voila, you now have RC feeding into your ROV.
Plug in two of the TReX speed controllers. Channels 1 and 2 drive the fwd/rev/turn thrusters. The TReX can be set up to do onboard channel mixing, so the primary joystick of the RC transmitter could be used as a fwd/rev/turn control, just like a video game. (For those who are slow to pick up on hints, by just like a video game I mean it gives your operator an interface they're already more than comfortable with, which means less seat time is required for them to become proficient in using the ROV!)
Channels 3 and 4 use the second TReX drives two vertical thrusters that can be used for ascent/descent/tilt. Considering how many ROVs wound up in a massive down-pitch after picking up a mission prop, having the ability to counter imbalances is a huge plus.
This leaves two aux outputs. Provided you are using at least a six channel radio, one could be used for a spring-loaded manipulator. The drive motor would have to fight the spring in order to close, but it would allow for pretty fine control over a manipulator.
An alternate idea would be to use the aux outputs to drive ballast pumps. Since there's always a chance an ROV challenge will involve lifting a payload, ballast tank designs may be more competitive than strictly thruster-based designs. This gives you a way to drive the pumps.
Now for Nifty Part #1: Your umbilical is now miniscule. Two 14-12ga wires carry DC power to the ROV (this is a requirement of some of the ROV competitions or I'd argue for on-board SLA batteries.) A single coax carries the RC signal to the ROV. A single coax can carry video back to the surface. You can get very narrow 75ohm coax that would do a dandy job of this, and not add much at all to the umbilical. The umbilical is much narrower and lighter weight than the typical umbilical, leading to less drag in the water and fewer issues in balancing it for neutral buoyancy.
Nifty Part #2: You now have a completely electronically controlled sub. If, at a later date, you decide to add an onboard microprocessor to the sub it's dead-easy. The TReX controllers can be daisy-chained (they're addressable, and treat the serial connection as a common bus), so a single UART micro would do the job. And since TTL connections are available you don't even need level shifters on board in order to drive the TReX controllers (though it supports that mode as well.)
Nifty Part #3: Already mentioned, but RC radios present a tried, true, and pretty common interface to the ROV. Any kid who's played video games or flown an RC helicopter or airplane will be more than familiar with the control layout. Since older AM proportional radios would do the job as well as a higher-end newer radio, a second-hand radio can be had for not much money off Ebay. I picked up a six-channel Futaba AM system for $45 at a garage sale years ago. They're even cheaper now.
Now let's talk cost, because none of this comes for free:
The TReX controllers retail for $99 each. Figure another $50-100 for a radio off of Ebay. Figure another $50-100 for an IP66-rated enclosure and a set of IP66-rated connectors such as the Bulgin Buccaneer connectors that are sold by Digikey. Voila. You now have two speed controllers mounted in a dry box with hermetic waterproof connectors to hook it up to your thrusters, and a complete user interface at the top.
I realize that tacking $250-400 onto the price of an underwater ROV may be more than most teams are in for. However at the last competition I saw there were teams that spent well into the thousands on their ROVs, so it's not out of the question. Considering how many teams were tripped up by their user interface, I'd consider $300 as money well-spent if it gives the team full proportional control over every thruster and high current outputs for driving additional devices like thrusters, pumps, and solenoid valves.
Tom
Wednesday, September 5, 2007
ROV Competitions - Ideas for Teams
I was involved with an ROV competition earlier this year. "Involved" isn't really the right word, but it's the best one I can come up with. Among other things I tried to help out where I could, didn't help out nearly enough, took too long making underwater video cameras to film the event (which I hope are recycled onto someone's ROV), showed up to volunteer at the competition, wound up judging instead, and because of an incomplete understanding of the rules I likely created a situation that compromised the event. I got to see a lot of extremely hard-working kids, some really unsportsmanlike nasty infighting among some adults, and an amazing display of chivalry on the part of one team leader in particular.
Not sure I'm willing to go through that again.
So I'm helping out the best way I can: by writing. Here are my observations on the competition, and what I would do if I was to build an ROV for the MATE competition:
1 - The whole point is to have a good time.
Let me rephrase that: The whole point is to have a good time! If you get wrapped around the axle worrying about scoring high in the competition, especially if you're a mentor, you're missing the point. When in doubt, go back to #1.
2 - If you build so specifically to the competition rules as written, you can potentially design yourself out of the ability to adapt to unexpected problems.
In one instance a mission prop was slightly shorter than the design spec called for. One team designed so closely to spec that their ROV didn't fit where it was supposed to go. Think I'm kidding? I'm not.
This mirrors the real world, though. A good example is an instrument we have at work, for which a designer made provisions for a 10.00mm deep hole to take an M5x10 screw. The thing bottomed out. We pulled the screw out, measured it, and it was about 10.5mm long. This is what happens when you roll a thread onto a screw blank. The designer never knew that. M5x9 screws were not an option, so we ground the things to length, cleaned up the ends, cleaned up the threads with a die, etc. No time for that during an ROV competition. Plan for the unexpected.
3 - The operator will become disoriented.
Let's face it. You're using an underwater camera to experience your environment. Unless you replace the lens on your camera you're using a tiny field of view to tell you where you are, what orientation you're in, whether you're facing the right way, etc. No matter how much you tell yourself, "I won't lose track," you will. Everyone did.
I've come up with all sorts of instrumentation to keep an operator on target. Six axis IMUs, electronic compass, pressure transducers, video overlay boards, you name it. Want to know the simple answer to this?
Get one of those little keychain ball compasses you get in the gumball machine, epoxy it in place in view of your camera. You now have a compass and an artificial horizon. If you position it midway up your video frame, you should be staring at an even horizon on the ball compass. If you're looking at the top, you're pointing down. If you're looking at the bottom, you're pointing up. And if you note the orientation before your team lowers the ROV into the water, you know which way to head to get back to your team.
A depth gauge is also easily had. Get a long thin tube. Close it at one end and place that end up. As you submerge, the tube will fill up slightly with water. Guess what? The level will change depending on depth. Mark it. Use a tape measure in the pool and get precise values. Not sensitive enough? Stick an air resevoir at the top so you get a bigger differential change with depth. With a little experimentation you can get something that's sensitive enough to give you resolution in inches. Mark it on the tube. Voila. Depth gauge.
These two instruments will give you 90% of what you need in order to maneuver your ROV out of a blind corner. I watched one team fail to realize they were nose-down and staring at a blank pool floor for almost five minutes. Way too much time in a 15 minute competition.
4 - Trust each other and delegate duties
If you can't trust each other, you're not a team. I didn't have first-hand of this in the ROV competition, but I've seen it numerous other places: Primadonnas don't make teams. Encourage competing designs. Plan time to test them. Find out what works and what doesn't before competition. Document your tests so you don't repeat them. Document what ideas you discard and why so you revisit the ones you dropped for time constraints but not the ones you dropped because they simply didn't pan out. If in doubt, pursue two ideas and test them in a head-to-head test. Chances are there will be a clear winner. Going with one person's ideas means if they're steering you in circles, it's in circles you will go.
5 - Test test test test test!
I've heard it told to me time and time again: In Battlebots, it isn't the better robot that wins, it's the more experienced driver. In auto racing, it isn't the faster car that wins, it's the better driver. In dogfighting, it's not the superior aircraft that wins, it's... you get the idea. If you never get time in the saddle, you will choke in competition.
Before committing to something like an ROV competition, have a test site picked out. A pool, a lake, even a cattle watering tank is better than nothing. Without the ability to test you will fail.
6 - Stay on task.
This one shouldn't need saying, but apparently it was the one real show-stopper. Everyone procrastinated, and it showed. The amazing story was that one team consisting of two people built an ROV in two weeks and actually got up there in points. The sad story was that most of the other teams procrastinated, so they more or less did the same. There was no need for this. There was plenty of time.
Personally, I think this goes back to #5. If there's the prospect of driving an ROV at the end of the build session every single day, provided there's new stuff to test, chances are there will be new stuff to test. Every... single... day... This is a carrot. Use it.
7 - Do your research (aka The Rant)
Now I'll get on my soap box and rant. And rant and rant and rant.
DO YOUR RESEARCH!
I can't even begin to describe how many people I talked to who asked, "Where do you get all this information?" I used Google. I read. I got on Yahoo! I read. I joined online forums and mailing lists. I read. I checked out books from the library. I read. What the heck, people? This is called doing your research.
What really amazed me was that it wasn't necessarily the students who were giving me blank stares about the idea of using Google for research, it was the mentors! It was the teachers!
Holy crap stack, Batman, there are literally thousands of people out there building ROVs not for competition, but for commercial use, for scientific research, for treasure hunting, for search and rescue, or just for the heck of it. And hundreds of them are online, reading email, writing web pages, answering questions, offering opinions, throwing out ideas, getting excited about what you are doing, and being a resource!
Before someone says that the Internet shouldn't be used for research, please let me correct you. We use it all the time at work. This is how we find out what other people are doing, and if their methods are better than what we're using. This is how we find out about new products that might make our workflow easier. This is how we get in contact with people who might eventually build stuff for us, or better yet design stuff for us. This is how a good percentage of my time is spent, and the benefits are enormous. If you want to teach kids how it's done in the so-called real world, this really is how it's done. It begins with a search.
This research can spare you months of wasted labor, because someone might already have tried your ideas out and either proved or disproved them. This research can spare you a blown competition because you might be able to read someone's blog where their ROV of similar designed for the following reasons... This research can spare you a lot of your operating budget if you find out before buying parts that parts X, Y, and Z aren't even waterproof! It's worth having everyone on the team scour the Internet for ideas for a solid week before they ever set foot in the workshop. Fish for ideas. Scratch off the bad ones. Underline the good ones. Bring them in and brainstorm. Then go back out with your plan and see if there's anything out there you can use to refine it.
If everyone did this, the competitions would be out of this world.
But enough of ranting. Go back to #1. Build. Dive. Enjoy. And dream of what you want to do next year.
-- Tom
Not sure I'm willing to go through that again.
So I'm helping out the best way I can: by writing. Here are my observations on the competition, and what I would do if I was to build an ROV for the MATE competition:
1 - The whole point is to have a good time.
Let me rephrase that: The whole point is to have a good time! If you get wrapped around the axle worrying about scoring high in the competition, especially if you're a mentor, you're missing the point. When in doubt, go back to #1.
2 - If you build so specifically to the competition rules as written, you can potentially design yourself out of the ability to adapt to unexpected problems.
In one instance a mission prop was slightly shorter than the design spec called for. One team designed so closely to spec that their ROV didn't fit where it was supposed to go. Think I'm kidding? I'm not.
This mirrors the real world, though. A good example is an instrument we have at work, for which a designer made provisions for a 10.00mm deep hole to take an M5x10 screw. The thing bottomed out. We pulled the screw out, measured it, and it was about 10.5mm long. This is what happens when you roll a thread onto a screw blank. The designer never knew that. M5x9 screws were not an option, so we ground the things to length, cleaned up the ends, cleaned up the threads with a die, etc. No time for that during an ROV competition. Plan for the unexpected.
3 - The operator will become disoriented.
Let's face it. You're using an underwater camera to experience your environment. Unless you replace the lens on your camera you're using a tiny field of view to tell you where you are, what orientation you're in, whether you're facing the right way, etc. No matter how much you tell yourself, "I won't lose track," you will. Everyone did.
I've come up with all sorts of instrumentation to keep an operator on target. Six axis IMUs, electronic compass, pressure transducers, video overlay boards, you name it. Want to know the simple answer to this?
Get one of those little keychain ball compasses you get in the gumball machine, epoxy it in place in view of your camera. You now have a compass and an artificial horizon. If you position it midway up your video frame, you should be staring at an even horizon on the ball compass. If you're looking at the top, you're pointing down. If you're looking at the bottom, you're pointing up. And if you note the orientation before your team lowers the ROV into the water, you know which way to head to get back to your team.
A depth gauge is also easily had. Get a long thin tube. Close it at one end and place that end up. As you submerge, the tube will fill up slightly with water. Guess what? The level will change depending on depth. Mark it. Use a tape measure in the pool and get precise values. Not sensitive enough? Stick an air resevoir at the top so you get a bigger differential change with depth. With a little experimentation you can get something that's sensitive enough to give you resolution in inches. Mark it on the tube. Voila. Depth gauge.
These two instruments will give you 90% of what you need in order to maneuver your ROV out of a blind corner. I watched one team fail to realize they were nose-down and staring at a blank pool floor for almost five minutes. Way too much time in a 15 minute competition.
4 - Trust each other and delegate duties
If you can't trust each other, you're not a team. I didn't have first-hand of this in the ROV competition, but I've seen it numerous other places: Primadonnas don't make teams. Encourage competing designs. Plan time to test them. Find out what works and what doesn't before competition. Document your tests so you don't repeat them. Document what ideas you discard and why so you revisit the ones you dropped for time constraints but not the ones you dropped because they simply didn't pan out. If in doubt, pursue two ideas and test them in a head-to-head test. Chances are there will be a clear winner. Going with one person's ideas means if they're steering you in circles, it's in circles you will go.
5 - Test test test test test!
I've heard it told to me time and time again: In Battlebots, it isn't the better robot that wins, it's the more experienced driver. In auto racing, it isn't the faster car that wins, it's the better driver. In dogfighting, it's not the superior aircraft that wins, it's... you get the idea. If you never get time in the saddle, you will choke in competition.
Before committing to something like an ROV competition, have a test site picked out. A pool, a lake, even a cattle watering tank is better than nothing. Without the ability to test you will fail.
6 - Stay on task.
This one shouldn't need saying, but apparently it was the one real show-stopper. Everyone procrastinated, and it showed. The amazing story was that one team consisting of two people built an ROV in two weeks and actually got up there in points. The sad story was that most of the other teams procrastinated, so they more or less did the same. There was no need for this. There was plenty of time.
Personally, I think this goes back to #5. If there's the prospect of driving an ROV at the end of the build session every single day, provided there's new stuff to test, chances are there will be new stuff to test. Every... single... day... This is a carrot. Use it.
7 - Do your research (aka The Rant)
Now I'll get on my soap box and rant. And rant and rant and rant.
DO YOUR RESEARCH!
I can't even begin to describe how many people I talked to who asked, "Where do you get all this information?" I used Google. I read. I got on Yahoo! I read. I joined online forums and mailing lists. I read. I checked out books from the library. I read. What the heck, people? This is called doing your research.
What really amazed me was that it wasn't necessarily the students who were giving me blank stares about the idea of using Google for research, it was the mentors! It was the teachers!
Holy crap stack, Batman, there are literally thousands of people out there building ROVs not for competition, but for commercial use, for scientific research, for treasure hunting, for search and rescue, or just for the heck of it. And hundreds of them are online, reading email, writing web pages, answering questions, offering opinions, throwing out ideas, getting excited about what you are doing, and being a resource!
Before someone says that the Internet shouldn't be used for research, please let me correct you. We use it all the time at work. This is how we find out what other people are doing, and if their methods are better than what we're using. This is how we find out about new products that might make our workflow easier. This is how we get in contact with people who might eventually build stuff for us, or better yet design stuff for us. This is how a good percentage of my time is spent, and the benefits are enormous. If you want to teach kids how it's done in the so-called real world, this really is how it's done. It begins with a search.
This research can spare you months of wasted labor, because someone might already have tried your ideas out and either proved or disproved them. This research can spare you a blown competition because you might be able to read someone's blog where their ROV of similar designed for the following reasons... This research can spare you a lot of your operating budget if you find out before buying parts that parts X, Y, and Z aren't even waterproof! It's worth having everyone on the team scour the Internet for ideas for a solid week before they ever set foot in the workshop. Fish for ideas. Scratch off the bad ones. Underline the good ones. Bring them in and brainstorm. Then go back out with your plan and see if there's anything out there you can use to refine it.
If everyone did this, the competitions would be out of this world.
But enough of ranting. Go back to #1. Build. Dive. Enjoy. And dream of what you want to do next year.
-- Tom
Sunday, August 19, 2007
How come?
How come as soon as you have a new hobby, events conspire to make sure you can't do anything about it? In the last week we've had a hurricane (can't fly kites in a hurricane), a wildfire that almost took out my neighborhood (can't fly kites in smoke with helicopters), a tsunami warning (ok, ok, so you can fly kites during a tsunami... besides, it hit at 3am), and some nasty sessions at work (no flying at lunch.) I just wanted to fly!
So how come when you think you have your best hobby day in a long time, you find out later you're wrong? To be fair I have to temper that statement somewhat. I took off for work early (we're going to be at a remote work site for upwards of eight to eleven days, and I got a head-start). It was howling tradewinds when I left home (upwards of 40kts) but it was just a nice steady breeze at the pu'u I wanted to photograph. Kite went up, it was rock solid in the air, so I hooked up the rig and let out line. Hot dog! The rig was stable, I got lots of photographs (81), and the camera didn't go to sleep even once during the entire hour-long session. I was stoked!
Aaaaand then I took a look at the pictures. I can't say I was disappointed, bu... no, actually, I was pretty darned disappointed. I missed several targets (I still can't aim the thing well) and the rig was right in the sun most of the time, so I was flying blind for the most part. I think I'd have had better luck with an autoKAP rig and a lot more walking.
In any case the wind cooperated, and I'm interested in trying it again later in the week.
On other news, my shop is still a mess, but I've come up with some projects to do. A lot of strictly 2D milling, but if I can get all the parts to fit in a 6"x6" square I can prototype them in 1/16" 6061 and then make the final parts using carbon fiber. But I'll likely have a waterjet house cut the carbon fiber. It's hellish on tools and lungs.
I convinced some folks at work to look into the Atmel ATNGW100 network gateway demo board. It's an AVR32 processor running an honest to goodness installation of Linux. Out of the box it's running Samba, Apache, sshd, and a bunch of other stuff. We're looking at it for the automation project that's going on, but I'm also interested in it for a few other reasons as well:
Your typical Linux server (not desktop) draws roughly 100-200 watts constantly. Say you've got a server that serves web, mail, disk, and a handful of other services in addition to ssh for logins. 100 watts, 24 hours in a day, that's 2.4kWh to run the thing.
Now just suppose you used an ATNGW100 to do the same thing. It consumes around 100mW, though it has no disks. It can act as a USB host, though, so USB or network attached storage can provide disk. (It does have an SD and MMC card slot, but constantly banging an SD or MMC card will kill it in short order.) If you can manage to arrange your fetchmail cron jobs so it only turns on the disk once every ten minutes or so, you're still looking at roughly 150mW. 24 hours in a day, that's 0.0036kWh per day. That's a lot better.
Mind you I haven't tested this, but it's a plan in the works. I should have the ATNGW100 in about a week, and should be able to try setting up a replacement Linux host shortly after that. Radio Shack sells an IDE->USB enclosure that'll take any IDE drive. (But for a little more I can get a 250GB USB drive, so I'll probably ask my boss to spring for that instead.) Hope it works.
By extension, these could also be extremely cheap DNS, DHCP, NIS, etc. servers. One of the best DNS/DHCP implementations I saw was this very scalable, highly redundant multi-server setup a friend of mine did for Tivoli. If this could be done on a slightly smaller scale using ATNGW100 boards, but losing none of the redundancy and fail-over functionality, that could be a really nice alternative to the single point of failure model so many small business use.
A quick rant: At home I run a single Linux server that takes care of several tasks. But I would never ever do this in the work place. It's asking for trouble. Get separate machines for each service: one for mail, one for DHCP/DNS, one for web, etc. Preferably get more than one so you have some fail-over assurance. But at no point should a single point of failure for one service mean that another service might be compromised. I've been at places that use the home model at work, and it never performs well.
This is one of the reasons I'm so interested in seeing if the ATNGW100 can be used this way. Figure your typical new Linux machine is between $500 and $2500 US. An ATNGW100 is $89. Add a nice case and a wall wart power supply and the price is about $120. You can get four of those for the price of a desktop "server" or upwards of 20+ for the price of a decent server. Set some up as load-balancers and the rest up as redundant single-service servers, and you have an infrastructure that would be very very hard to take down, and dead-easy to maintain and upgrade with nearly zero down-time.
Can't wait to find out if I've got my foot shoved in my mouth for saying that! Only time will tell.
Tom
So how come when you think you have your best hobby day in a long time, you find out later you're wrong? To be fair I have to temper that statement somewhat. I took off for work early (we're going to be at a remote work site for upwards of eight to eleven days, and I got a head-start). It was howling tradewinds when I left home (upwards of 40kts) but it was just a nice steady breeze at the pu'u I wanted to photograph. Kite went up, it was rock solid in the air, so I hooked up the rig and let out line. Hot dog! The rig was stable, I got lots of photographs (81), and the camera didn't go to sleep even once during the entire hour-long session. I was stoked!
Aaaaand then I took a look at the pictures. I can't say I was disappointed, bu... no, actually, I was pretty darned disappointed. I missed several targets (I still can't aim the thing well) and the rig was right in the sun most of the time, so I was flying blind for the most part. I think I'd have had better luck with an autoKAP rig and a lot more walking.
In any case the wind cooperated, and I'm interested in trying it again later in the week.
On other news, my shop is still a mess, but I've come up with some projects to do. A lot of strictly 2D milling, but if I can get all the parts to fit in a 6"x6" square I can prototype them in 1/16" 6061 and then make the final parts using carbon fiber. But I'll likely have a waterjet house cut the carbon fiber. It's hellish on tools and lungs.
I convinced some folks at work to look into the Atmel ATNGW100 network gateway demo board. It's an AVR32 processor running an honest to goodness installation of Linux. Out of the box it's running Samba, Apache, sshd, and a bunch of other stuff. We're looking at it for the automation project that's going on, but I'm also interested in it for a few other reasons as well:
Your typical Linux server (not desktop) draws roughly 100-200 watts constantly. Say you've got a server that serves web, mail, disk, and a handful of other services in addition to ssh for logins. 100 watts, 24 hours in a day, that's 2.4kWh to run the thing.
Now just suppose you used an ATNGW100 to do the same thing. It consumes around 100mW, though it has no disks. It can act as a USB host, though, so USB or network attached storage can provide disk. (It does have an SD and MMC card slot, but constantly banging an SD or MMC card will kill it in short order.) If you can manage to arrange your fetchmail cron jobs so it only turns on the disk once every ten minutes or so, you're still looking at roughly 150mW. 24 hours in a day, that's 0.0036kWh per day. That's a lot better.
Mind you I haven't tested this, but it's a plan in the works. I should have the ATNGW100 in about a week, and should be able to try setting up a replacement Linux host shortly after that. Radio Shack sells an IDE->USB enclosure that'll take any IDE drive. (But for a little more I can get a 250GB USB drive, so I'll probably ask my boss to spring for that instead.) Hope it works.
By extension, these could also be extremely cheap DNS, DHCP, NIS, etc. servers. One of the best DNS/DHCP implementations I saw was this very scalable, highly redundant multi-server setup a friend of mine did for Tivoli. If this could be done on a slightly smaller scale using ATNGW100 boards, but losing none of the redundancy and fail-over functionality, that could be a really nice alternative to the single point of failure model so many small business use.
A quick rant: At home I run a single Linux server that takes care of several tasks. But I would never ever do this in the work place. It's asking for trouble. Get separate machines for each service: one for mail, one for DHCP/DNS, one for web, etc. Preferably get more than one so you have some fail-over assurance. But at no point should a single point of failure for one service mean that another service might be compromised. I've been at places that use the home model at work, and it never performs well.
This is one of the reasons I'm so interested in seeing if the ATNGW100 can be used this way. Figure your typical new Linux machine is between $500 and $2500 US. An ATNGW100 is $89. Add a nice case and a wall wart power supply and the price is about $120. You can get four of those for the price of a desktop "server" or upwards of 20+ for the price of a decent server. Set some up as load-balancers and the rest up as redundant single-service servers, and you have an infrastructure that would be very very hard to take down, and dead-easy to maintain and upgrade with nearly zero down-time.
Can't wait to find out if I've got my foot shoved in my mouth for saying that! Only time will tell.
Tom
Wednesday, August 8, 2007
Ups and Downs
It was the best of times, it was the... well... no, actually times have been pretty good.
Sports mode on my camera is lame (it goes to "sleep" (as opposed to "powered off") after five minutes, despite the auto power-off setting of 30 minutes), the servo change gets me a full 90-degrees of tilt (good!) the new kites rock the house, and I got several hours of flight time over the weekend and this week.

I got my first real honest-to-goodness planned shot (a vertical portrait) and my first kite-photographing-another-kite shot (I had two line tangles before all was said and done, but I got one decent picture). I completely drained the batteries on my transmitter, found out the new charger automagically powers off when the battery is charged, and feel a lot more confident in the setup now.
I've got plans to make either a 6' or an 8' rokkaku to compliment the Flowforms, and should be expanding my available wind range by a lot in the very near future. Life's good.
Then I unwittingly stepped into the proverbial "it" in a discussion forum, making some off-hand comments in a thread on rig stability that was a lot more heated than I thought. I hate it when that happens. I hope my comments didn't do anything to throw fuel on a fire, but chances are they did. In any case I'm new to KAP, I really don't have any usable input to share, so I'm dropping out of that discussion.
Which leaves more time for flying, so I'm taking that as an up and smiling, regardless.
In the meanwhile I spent some time this morning cleaning out the shop. I don't have any plans at the moment to make new stuff, but it's getting close. A fellow KAPer from Brazil posted some videos of his CNC router doing gear-cutting on Youtube. That got me to thinking about my whole strategy of proofing robot parts on the scrollsaw. I think maybe I should come up with a sacrificial router table I can bolt to the mill and use it to make bot parts instead. Take off the rotary axis, take off the vise, and just leave it in 2D mode for a while. It might see more use that way.
Something else is coming up at work that might involve thread milling. That's something I've been itching to do for some time, so I'm looking forward to it. This technique can also be used to make things like filter rings for cameras, so there's plenty of cross-over potential.
Ups and downs, but on the whole life is good. Plus, the wind is up, the sun is shining, and my kite bag is in the car. I'm flying at lunch time. Can't beat it.
Tom
Sports mode on my camera is lame (it goes to "sleep" (as opposed to "powered off") after five minutes, despite the auto power-off setting of 30 minutes), the servo change gets me a full 90-degrees of tilt (good!) the new kites rock the house, and I got several hours of flight time over the weekend and this week.

I got my first real honest-to-goodness planned shot (a vertical portrait) and my first kite-photographing-another-kite shot (I had two line tangles before all was said and done, but I got one decent picture). I completely drained the batteries on my transmitter, found out the new charger automagically powers off when the battery is charged, and feel a lot more confident in the setup now.
I've got plans to make either a 6' or an 8' rokkaku to compliment the Flowforms, and should be expanding my available wind range by a lot in the very near future. Life's good.
Then I unwittingly stepped into the proverbial "it" in a discussion forum, making some off-hand comments in a thread on rig stability that was a lot more heated than I thought. I hate it when that happens. I hope my comments didn't do anything to throw fuel on a fire, but chances are they did. In any case I'm new to KAP, I really don't have any usable input to share, so I'm dropping out of that discussion.
Which leaves more time for flying, so I'm taking that as an up and smiling, regardless.
In the meanwhile I spent some time this morning cleaning out the shop. I don't have any plans at the moment to make new stuff, but it's getting close. A fellow KAPer from Brazil posted some videos of his CNC router doing gear-cutting on Youtube. That got me to thinking about my whole strategy of proofing robot parts on the scrollsaw. I think maybe I should come up with a sacrificial router table I can bolt to the mill and use it to make bot parts instead. Take off the rotary axis, take off the vise, and just leave it in 2D mode for a while. It might see more use that way.
Something else is coming up at work that might involve thread milling. That's something I've been itching to do for some time, so I'm looking forward to it. This technique can also be used to make things like filter rings for cameras, so there's plenty of cross-over potential.
Ups and downs, but on the whole life is good. Plus, the wind is up, the sun is shining, and my kite bag is in the car. I'm flying at lunch time. Can't beat it.
Tom
Thursday, August 2, 2007
Airborne At Last
My kites should've arrived Saturday, but there was no notice at the post office. I checked on Monday, but no notice. So Monday night I used the USPS tracking page and... Yep, it had been delivered Saturday morning at 6am, but I never got my yellow card to tell me it was there. So Tuesday morning I asked if I had a box, and sure enough there it was. NEW KITES!
By the time I got back to my car, the rain had started... The fates love me.
So I spent some time installing the PeKaBe blocks (which are great) re-rigging the tails to fit onto the Flowforms (which was dead-easy) and finding some way to put a thousand feet of #250 dacron line onto a winder (I used an extension cord reel from the hardware store). Yep, still raining.
It rained the next day, too. So I drove home at the end of the day and... no rain! No rain?! No rain. I grabbed the kite bag, grabbed some kids, and almost sprinted to the pasture near my house only to find... It was full of cows who'd probably bolt at the sight of a great big flying mattress, and probably poop on my gear. So I threw kids in the car, threw my kites in the back and took off. I drove until sun-down, and one after another I had no-go flying sites (no wind; wind, but helicopters; no wind; wind blowing into power lines; wind shift, and the power lines moved to the other side, so back into power lines; rain). The fates love me.
So finally it was clear this morning. I had some time before an appointment, so I launched. The new kites are outstanding. The wind was gusty, so I can't say they were rock solid (no kite would be in gusty wind) but it was pull and lull in turns, not wild gyrations all over the sky like the older kites! I threw caution to the wind (har) and hooked up my rig. A quick gear check and I was airborne again! Click click click... click click... click... Five minutes before my appointment I walked the kite down, put the gear away, and took off. It was a good two hours before I got to look at what I'd captured on camera. I loaded the card, opened it up, and... Quicktimes? Somehow my camera had been set to movie mode. ARGH! The fates love me.
I went back out at lunch (of course) and made sure the camera was set to photo mode. All in all things worked out well. There was maybe one keeper out of about thirty images, but I learned a lot from my mistakes. I have some wind-induced tilt to the rig I need to think about. I found a sports mode setting on the camera that gives significantly faster shutter speed, making for fewer blurred shots. I found out that KAP movies make me nauseous. Even when I did them on purpose the second time. Too much motion.
All in all, though, I'm stoked. I have some stuff to try out (sports mode, check rig balance, try to get more travel out of my tilt servo), I have an utterly unphotogenic site to test at, and I have a weekend full of beautiful beaches to look forward to with my hopefully newly developed technique.
Maybe the fates really do love me after all!
Tom
By the time I got back to my car, the rain had started... The fates love me.
So I spent some time installing the PeKaBe blocks (which are great) re-rigging the tails to fit onto the Flowforms (which was dead-easy) and finding some way to put a thousand feet of #250 dacron line onto a winder (I used an extension cord reel from the hardware store). Yep, still raining.
It rained the next day, too. So I drove home at the end of the day and... no rain! No rain?! No rain. I grabbed the kite bag, grabbed some kids, and almost sprinted to the pasture near my house only to find... It was full of cows who'd probably bolt at the sight of a great big flying mattress, and probably poop on my gear. So I threw kids in the car, threw my kites in the back and took off. I drove until sun-down, and one after another I had no-go flying sites (no wind; wind, but helicopters; no wind; wind blowing into power lines; wind shift, and the power lines moved to the other side, so back into power lines; rain). The fates love me.
So finally it was clear this morning. I had some time before an appointment, so I launched. The new kites are outstanding. The wind was gusty, so I can't say they were rock solid (no kite would be in gusty wind) but it was pull and lull in turns, not wild gyrations all over the sky like the older kites! I threw caution to the wind (har) and hooked up my rig. A quick gear check and I was airborne again! Click click click... click click... click... Five minutes before my appointment I walked the kite down, put the gear away, and took off. It was a good two hours before I got to look at what I'd captured on camera. I loaded the card, opened it up, and... Quicktimes? Somehow my camera had been set to movie mode. ARGH! The fates love me.
I went back out at lunch (of course) and made sure the camera was set to photo mode. All in all things worked out well. There was maybe one keeper out of about thirty images, but I learned a lot from my mistakes. I have some wind-induced tilt to the rig I need to think about. I found a sports mode setting on the camera that gives significantly faster shutter speed, making for fewer blurred shots. I found out that KAP movies make me nauseous. Even when I did them on purpose the second time. Too much motion.
All in all, though, I'm stoked. I have some stuff to try out (sports mode, check rig balance, try to get more travel out of my tilt servo), I have an utterly unphotogenic site to test at, and I have a weekend full of beautiful beaches to look forward to with my hopefully newly developed technique.
Maybe the fates really do love me after all!
Tom
Friday, July 27, 2007
Back in the Shop
Since it's the shop that let me buy my kites, it's the shop I'm turning back to now while the kites are still in the mail. I've sorted through my ongoing project list, and picked two of them to really hammer on:
The first is a spindle tachometer. The need's easy to demonstrate. This question shows up on the online forums all the time: how to tell how fast my spindle is going? There are a number of approaches to sensing, but what's needed at the other end is a numeric display of some sort. This implies either LEDs or an LCD. For readability, the bigger the better (within reason!)
So I took a look at the AVR Butterfly, which has a pretty big segmented LCD. Six characters, so it'd be good to several tens of thousands of RPMs. And the Butterfly has an ATmega169 onboard running at 8MHz (with the right fuse settings) so it's got plenty of horsepower. Only problem is all the I/O pins that can act as clock sources for the onboard counters are all tied up with the LCD. ARGH! And INT0 and INT1 pins are tied up, too. Which leaves the normal pin change interrupt routines, which are slower. But at 8MHz the 169 can easily keep up with a spindle rotating at up to 30kRPM.
Rather it could keep up with a spindle sending out 30k pulses per minute, which is different. For sensing I'm going to document three approaches: One uses an optical interrupter to read holes in a plate. My mill has a single index hole, my lathe has a 60-hole indexing plate for doing live tooling index jobs. So the number of pulses/rev would have to be user-settable. The second method is to use an optical reflector reading black and white stripes off a pattern that's copied or laser printed and affixed to the end of the spindle pulley. The third is to drill and embed a neodymium magnet into the pulley and read it with a Hall-effect switch. (Surely among these three the interested reader could find one they'd feel comfortable with! The article would then give instructions for downloading the Butterfly's source off of AVRfreaks or Sourceforge.
The second article would be a much longer and much more thought out version of my toolbar article for the mill-as-lathe. The difference is I'd also go ahead and include all the stuff for using the mill as a lathe, multiple tools, switching coordinate systems to pick up offsets, etc. This would hopefully be useful to someone with a CNC mill but not a CNC lathe (like me!) and also force me to start using multiple tool settings. In the process of writing the article I know I'll stumble a lot, so with any luck the final article will point out some of the more likely pitfalls and try to save the reader from running into them full-tilt (like I'm sure to do.)
This means I'll have to finish my second toolbar, drill the cross-holes so either one could be mounted vertically or horizontally, and add the holes in the second bar to take drill bits (or make bolt-on units in place of the tool caps.) In the end I'll have what'll probably wind up being a multi-issue article (my first!) and a full-blown twelve-tool plus six drill position toolchanger for my CNC face lathe.
I just hope it doesn't take three years to get this stuff published this time... Need more kites...
Tom
The first is a spindle tachometer. The need's easy to demonstrate. This question shows up on the online forums all the time: how to tell how fast my spindle is going? There are a number of approaches to sensing, but what's needed at the other end is a numeric display of some sort. This implies either LEDs or an LCD. For readability, the bigger the better (within reason!)
So I took a look at the AVR Butterfly, which has a pretty big segmented LCD. Six characters, so it'd be good to several tens of thousands of RPMs. And the Butterfly has an ATmega169 onboard running at 8MHz (with the right fuse settings) so it's got plenty of horsepower. Only problem is all the I/O pins that can act as clock sources for the onboard counters are all tied up with the LCD. ARGH! And INT0 and INT1 pins are tied up, too. Which leaves the normal pin change interrupt routines, which are slower. But at 8MHz the 169 can easily keep up with a spindle rotating at up to 30kRPM.
Rather it could keep up with a spindle sending out 30k pulses per minute, which is different. For sensing I'm going to document three approaches: One uses an optical interrupter to read holes in a plate. My mill has a single index hole, my lathe has a 60-hole indexing plate for doing live tooling index jobs. So the number of pulses/rev would have to be user-settable. The second method is to use an optical reflector reading black and white stripes off a pattern that's copied or laser printed and affixed to the end of the spindle pulley. The third is to drill and embed a neodymium magnet into the pulley and read it with a Hall-effect switch. (Surely among these three the interested reader could find one they'd feel comfortable with! The article would then give instructions for downloading the Butterfly's source off of AVRfreaks or Sourceforge.
The second article would be a much longer and much more thought out version of my toolbar article for the mill-as-lathe. The difference is I'd also go ahead and include all the stuff for using the mill as a lathe, multiple tools, switching coordinate systems to pick up offsets, etc. This would hopefully be useful to someone with a CNC mill but not a CNC lathe (like me!) and also force me to start using multiple tool settings. In the process of writing the article I know I'll stumble a lot, so with any luck the final article will point out some of the more likely pitfalls and try to save the reader from running into them full-tilt (like I'm sure to do.)
This means I'll have to finish my second toolbar, drill the cross-holes so either one could be mounted vertically or horizontally, and add the holes in the second bar to take drill bits (or make bolt-on units in place of the tool caps.) In the end I'll have what'll probably wind up being a multi-issue article (my first!) and a full-blown twelve-tool plus six drill position toolchanger for my CNC face lathe.
I just hope it doesn't take three years to get this stuff published this time... Need more kites...
Tom
Tuesday, July 24, 2007
Chewing Fingernails and Shifting Gears
Ok, so when I posted last I'd picked out the kites of choice, but hadn't been able to order. Now I've ordered, but won't have the kites for several days. Gnargh! Gotta stop chewing my fingernails and relax, I suppose. If it was only that easy...
After measuring the two kites I do have (both parafoils, both unstable in the air) I have a 2.0 and a 14.5 sq ft kite. The line I thought was #200 wasn't, so I picked up a thousand feet of #250 black dacron line and a new hoop winder. (I repaired my old hoop for the third time, and plan to put my old line back on it. It's good line! And now I've learned if I fall, not to land on the winder.)
The check for the article really was $240, so that left me with a little extra. Almost $40, to be exact. Which is just the price for four PeKaBe blocks. Yahoo!! I've been eyeballing PeKaBe blocks for my RC sailboat for years, and have been eyeballing them for KAP since I first started trying to design a real KAP rig. Every comment I've seen people write about the PeKaBe blocks has been positive. And since it's something that tends to be a buy once, I'm hoping it's $40 well-spent. The only real concern is something from http://arch.ced.berkeley.edu/kap/kaptoc.html regarding balance. The PeKaBe blocks are so friction-free, any imbalance in the rig really really shows up. So I'll probably be due for a re-balance, and it'll be time to finally strap on the permanent battery and retire the AA battery pack.
Taking some more advice from the KAP forum, I'm going to spend at least a couple of outings just learning to fly the Flowforms. The next step will be to hook up a 713g dummy weight 100' down-line from the kite, and fly it as if I have my KAP rig on there. Once I'm comfortable with the kites, and know their limits in the winds we get around here, then I'll hook up the KAP rig and get airborne again.
So I'm still chewing my fingernails, but at least I've changed gears. I started off chewing my fingernails because I couldn't get my kites to reliably lift my rig. Then I was chewing my fingernails because I knew what the fix was, but couldn't afford the new kites. Now I'm chewing my fingernails because I know the fix is sooooooo close, but not here yet. But at least now I know it's in sight. It'll happen. And I will eventually get airborne and be able to keep it that way.
Aaaaahhh...
Ok, time to write the next set of articles. This last one saved my butt!
Tom
After measuring the two kites I do have (both parafoils, both unstable in the air) I have a 2.0 and a 14.5 sq ft kite. The line I thought was #200 wasn't, so I picked up a thousand feet of #250 black dacron line and a new hoop winder. (I repaired my old hoop for the third time, and plan to put my old line back on it. It's good line! And now I've learned if I fall, not to land on the winder.)
The check for the article really was $240, so that left me with a little extra. Almost $40, to be exact. Which is just the price for four PeKaBe blocks. Yahoo!! I've been eyeballing PeKaBe blocks for my RC sailboat for years, and have been eyeballing them for KAP since I first started trying to design a real KAP rig. Every comment I've seen people write about the PeKaBe blocks has been positive. And since it's something that tends to be a buy once, I'm hoping it's $40 well-spent. The only real concern is something from http://arch.ced.berkeley.edu/kap/kaptoc.html regarding balance. The PeKaBe blocks are so friction-free, any imbalance in the rig really really shows up. So I'll probably be due for a re-balance, and it'll be time to finally strap on the permanent battery and retire the AA battery pack.
Taking some more advice from the KAP forum, I'm going to spend at least a couple of outings just learning to fly the Flowforms. The next step will be to hook up a 713g dummy weight 100' down-line from the kite, and fly it as if I have my KAP rig on there. Once I'm comfortable with the kites, and know their limits in the winds we get around here, then I'll hook up the KAP rig and get airborne again.
So I'm still chewing my fingernails, but at least I've changed gears. I started off chewing my fingernails because I couldn't get my kites to reliably lift my rig. Then I was chewing my fingernails because I knew what the fix was, but couldn't afford the new kites. Now I'm chewing my fingernails because I know the fix is sooooooo close, but not here yet. But at least now I know it's in sight. It'll happen. And I will eventually get airborne and be able to keep it that way.
Aaaaahhh...
Ok, time to write the next set of articles. This last one saved my butt!
Tom
Monday, July 23, 2007
KAP is Another One of Those Hobbies
My wife and I have expensive hobbies. I'm a home shop machinist. She's a jeweler. We both do photography. We both like to fly kites. And now I'm combining the latter two with KAP.
"No problem!" I thought. "I have kites, I have a camera, I have a radio, it's gonna be easy!"
Hahahahaha! Oh how naive I have been. As life turns out, the kite I've never been able to get to fly well still doesn't fly well. Last Saturday the kite pulled a 180, screamed for the ground, and wound up in a kiawe tree (think of a mesquite tree, lengthen the thorns, and you're there). Recovered, flew again, things got stable, put on the rig, flew it to about 50', then the kite dove for the ground again. KAP rig in the kiawe this time, the kite out on the lava. Recovered, packed up, and moved to another beach. Stable as a rock. GREAT! Nope, the kite pulled a 180, the KAP rig hit rocks, the kite hit asphalt, the line was draped over all kinds of scrub.
So I fielded some questions on the KAP forums. The consensus was that parafoils are notoriously hard to tune, finicky, and yeah, what I'm seeing indicates an out of tune kite. Rather than frustrate myself and lose my rig with the thing, I started looking at replacements. Lots of good advice there, too. I'm planning on getting two Sutton Flowform kites. One's an 8 square foot kite (to replace my smaller parafoil with a slightly larger sail - great for Waimea). The other is a 16 square foot kite (to replace my 14.5 square foot parafoil... the one that's giving me fits.) Throw in a thousand feet of #250 line for the FF16, a 9" hoop winder for the new line, and my price is up to $200 US.
Sigh... And here I thought I'd finally found an inexpensive hobby I enjoy. NOPE!
Good thing is I just got notice that an article I'd written three years ago actually got published. I ran through the article as printed, compared it to the payment schedule from three years ago, and figure it should be around $240 for the article. Egads I love how life turns out sometimes. I hope to get the check in the next few days, and will order all the new kite gear the same day. 'Till then I'm grounded.
But being a tinkerer and being unable to let something go just because it's "broken", I'm still planning to tune that parafoil. I may never hang a camera from it again (in fact I mean not to). But if I can get it tuned, it'll be one more skill I know I can pick up, and I'll have a kite I can dedicate to flying with the kids.
Tom
"No problem!" I thought. "I have kites, I have a camera, I have a radio, it's gonna be easy!"
Hahahahaha! Oh how naive I have been. As life turns out, the kite I've never been able to get to fly well still doesn't fly well. Last Saturday the kite pulled a 180, screamed for the ground, and wound up in a kiawe tree (think of a mesquite tree, lengthen the thorns, and you're there). Recovered, flew again, things got stable, put on the rig, flew it to about 50', then the kite dove for the ground again. KAP rig in the kiawe this time, the kite out on the lava. Recovered, packed up, and moved to another beach. Stable as a rock. GREAT! Nope, the kite pulled a 180, the KAP rig hit rocks, the kite hit asphalt, the line was draped over all kinds of scrub.
So I fielded some questions on the KAP forums. The consensus was that parafoils are notoriously hard to tune, finicky, and yeah, what I'm seeing indicates an out of tune kite. Rather than frustrate myself and lose my rig with the thing, I started looking at replacements. Lots of good advice there, too. I'm planning on getting two Sutton Flowform kites. One's an 8 square foot kite (to replace my smaller parafoil with a slightly larger sail - great for Waimea). The other is a 16 square foot kite (to replace my 14.5 square foot parafoil... the one that's giving me fits.) Throw in a thousand feet of #250 line for the FF16, a 9" hoop winder for the new line, and my price is up to $200 US.
Sigh... And here I thought I'd finally found an inexpensive hobby I enjoy. NOPE!
Good thing is I just got notice that an article I'd written three years ago actually got published. I ran through the article as printed, compared it to the payment schedule from three years ago, and figure it should be around $240 for the article. Egads I love how life turns out sometimes. I hope to get the check in the next few days, and will order all the new kite gear the same day. 'Till then I'm grounded.
But being a tinkerer and being unable to let something go just because it's "broken", I'm still planning to tune that parafoil. I may never hang a camera from it again (in fact I mean not to). But if I can get it tuned, it'll be one more skill I know I can pick up, and I'll have a kite I can dedicate to flying with the kids.
Tom
Friday, July 20, 2007
My Third Eye Really Is Blind
I used to do a lot of photography. 35mm and 4x5 were my media of choice. Then came kids. And I hate to say it, but the cameras really took a back-burner. Sure, I learned to use a point & shoot, and learned to do snapshots. In the process I learned that doing hard-core portraiture on a rapidly moving, often gooey target really wasn't all that fulfilling. So the cameras sat idle, my photographic synapses sat idle, and time passed.
About two years ago my wife and I sold all our 35mm camera bodies and film point & shoots, and used the money to buy a digital SLR body. Since we already had Canon EOS lenses, we went for a Canon D20 digital body. Fantastic camera. I love it. I just wish I got to use it more. Granted, I'm using it far more than I did the 35mm gear in the Post-Child era, but it's still nowhere near what it used to be when we were going out on the weekends simply to shoot.
I went through some pictures I've taken with the D20, and while technically the keepers really are keepers (sharp, no motion blur, good exposure levels, etc.) artistically they're a wash. If I look at some of my earlier work I can take in a shot and think, "Isolation", "Growth", "Perseverence" (and toss in every other catchword you've seen on a motivational poster.) Looking through my recent stuff I'm seeing "plant with rocks", "beach", "forest".
What it boils down to is this: I wouldn't hang any of it on my wall. We do have some of our own photography hanging on the walls at home. We've also got some Ansel Adams, Redeka, and Brandenburg, just to keep stuff in perspective. But I'm still happy to hang the shots of ours that we did. I'll never have Ansel Adams's artistry, but I can sure try.
I think it's still a problem of time. By way of example, I love doing 4x5 photography. You have one film holder with two sheets of film in it. The image on the ground-glass is upside-down and backward. Composition isn't so much placing objects in the frame, it's placing shapes and colors on a canvas. And I could easily spend an hour or more composing a single shot. Since I typically shoot B&W when I'm doing 4x5 (only one of my lenses is corrected in more than one color), I'll then spend another hour dinking around with filter choice. Then I'll decide the light's not right and make notes so I can come back to that spot some other day when the light is better. It's a glacially slow process that in the long-run can be very very rewarding. But to an innocent bystander? It's the Hell of Watching Paint Dry.
Needless to say, in this, the Era of Children, I don't often get the chance to spend hours on end staring at a ground glass with a towel over my head. I also don't often have the chance to work that way with the Canon gear, either. Photo sessions are a lot more rushed, and rather than being able to take the time to work with the camera until I really get what I want, I'm having to make do with what I can get. It shows.
My photographic eye is blind. I've lost track of what really makes a good shot. But I'm determined to get it back. I know I only developed it the first time by really working hard, shooting truckloads of film, and studying what I like in other photographers' work. So it'll be a long, long process. But it's worth it to me.
Tom
About two years ago my wife and I sold all our 35mm camera bodies and film point & shoots, and used the money to buy a digital SLR body. Since we already had Canon EOS lenses, we went for a Canon D20 digital body. Fantastic camera. I love it. I just wish I got to use it more. Granted, I'm using it far more than I did the 35mm gear in the Post-Child era, but it's still nowhere near what it used to be when we were going out on the weekends simply to shoot.
I went through some pictures I've taken with the D20, and while technically the keepers really are keepers (sharp, no motion blur, good exposure levels, etc.) artistically they're a wash. If I look at some of my earlier work I can take in a shot and think, "Isolation", "Growth", "Perseverence" (and toss in every other catchword you've seen on a motivational poster.) Looking through my recent stuff I'm seeing "plant with rocks", "beach", "forest".
What it boils down to is this: I wouldn't hang any of it on my wall. We do have some of our own photography hanging on the walls at home. We've also got some Ansel Adams, Redeka, and Brandenburg, just to keep stuff in perspective. But I'm still happy to hang the shots of ours that we did. I'll never have Ansel Adams's artistry, but I can sure try.
I think it's still a problem of time. By way of example, I love doing 4x5 photography. You have one film holder with two sheets of film in it. The image on the ground-glass is upside-down and backward. Composition isn't so much placing objects in the frame, it's placing shapes and colors on a canvas. And I could easily spend an hour or more composing a single shot. Since I typically shoot B&W when I'm doing 4x5 (only one of my lenses is corrected in more than one color), I'll then spend another hour dinking around with filter choice. Then I'll decide the light's not right and make notes so I can come back to that spot some other day when the light is better. It's a glacially slow process that in the long-run can be very very rewarding. But to an innocent bystander? It's the Hell of Watching Paint Dry.
Needless to say, in this, the Era of Children, I don't often get the chance to spend hours on end staring at a ground glass with a towel over my head. I also don't often have the chance to work that way with the Canon gear, either. Photo sessions are a lot more rushed, and rather than being able to take the time to work with the camera until I really get what I want, I'm having to make do with what I can get. It shows.
My photographic eye is blind. I've lost track of what really makes a good shot. But I'm determined to get it back. I know I only developed it the first time by really working hard, shooting truckloads of film, and studying what I like in other photographers' work. So it'll be a long, long process. But it's worth it to me.
Tom
Tuesday, July 17, 2007
The View from Up There
My batteries came in. After a little uncomfortable action modifying the transmitter with a Foredom, I got the new battery pack to fit. Servos were re-centered, things were adjusted, and off I went! I've flown three times since then, and I think I'm beginning to understand a little better.
My big kite likes light wind. It also needs more work. I did a bridle adjusting session and found some of the lines out by as much as 10mm. I also found one of the keels was loosing its stitching. When I flew today at lunch, I found not only was another keel loosing stitching (on the side it continually turns toward) but the rightmost cell is also coming undone. I'm going to check every seam on the thing tonight before getting it airborne again.
The rig works GREAT. There are some limits in range of motion (I can't set things up so the camera can sweep from horizon to vertical, but I can get pretty close.) It's fairly easy to steer, though the pan direction takes some getting used to (it's modified for continuous rotation.) All in all I'm pleased as punch, and can't wait to get my kites in shape.
I'm finding, though, that I have a really good tiny kite for howling wind conditions (when you don't really want to fly a camera, anyway) and one in need of repair for whisper light conditions. But I don't have a good mid-range kite. I'm looking at the Sutton Flowform, which has a reputation as a very solid lift kite. Ah well. Not right now. With some repairs my big kite should be good for about half the flying conditions near where I live. Now I need to find some pretty places to go that's in the range of conditions I can fly!
Woohoo!
Tom
My big kite likes light wind. It also needs more work. I did a bridle adjusting session and found some of the lines out by as much as 10mm. I also found one of the keels was loosing its stitching. When I flew today at lunch, I found not only was another keel loosing stitching (on the side it continually turns toward) but the rightmost cell is also coming undone. I'm going to check every seam on the thing tonight before getting it airborne again.
The rig works GREAT. There are some limits in range of motion (I can't set things up so the camera can sweep from horizon to vertical, but I can get pretty close.) It's fairly easy to steer, though the pan direction takes some getting used to (it's modified for continuous rotation.) All in all I'm pleased as punch, and can't wait to get my kites in shape.
I'm finding, though, that I have a really good tiny kite for howling wind conditions (when you don't really want to fly a camera, anyway) and one in need of repair for whisper light conditions. But I don't have a good mid-range kite. I'm looking at the Sutton Flowform, which has a reputation as a very solid lift kite. Ah well. Not right now. With some repairs my big kite should be good for about half the flying conditions near where I live. Now I need to find some pretty places to go that's in the range of conditions I can fly!
Woohoo!
Tom
Wednesday, July 11, 2007
Luckier than I Deserve to Be
I've had mixed luck with the AVR Dragon. It seems like I can use it to do ISP programming on a remote device, but that's about it. Thing is, it works perfectly, every time. But if I try to do ISP programming on a device that's plugged into the Dragon's ZIF socket, it fails in some weird way every time.
So on this last project I wound up using the STK500 and the Dragon in concert. The STK500 has two serial ports on it: one to program the device, one that can be attached to the device's onboard UART (if it has one... or more than one.) Problem is my laptop has no serial ports, so I was swapping my USB to serial adapter from one port to the other for programming and testing. It was a drag. In the end I wound up plugging the device's RS-232 port into my Linux box, using VNC on my laptop to connect to the Linux box, and ran it that way. This was better, but it was still a drag.
So this morning I brought in my Dragon, plugged it in as an ISP programmer for the ATmega16 plugged into the STK500, and voila, everything worked perfectly. The laptop's serial cable talks to the device's RS-232 port, and the Dragon acts as a programmer. Perfect.
But wait a sec... How come this only works for off-board targets?! I started to pry. That's when I realized what a doof I've been. After going through the connection diagrams for the ATmega16 (the one I'm using for the Tcl/Tk project), I realized that every time I'd installed a chip on the Dragon, I'd installed it backward. EVERY TIME.
That explained a lot.
So with shaking hands I put in an ATtiny85 (a little 8-pin processor that can crank out 20MIPS with the right crystal plugged in.) With even shakier hands I cabled it up for ISP / debugWIRE. (Since buying the Dragon I have never ever been able to get debugWIRE or JTAG debugging to work because I am a doof.) Click, start AVR Studio. Click, choose the LED blinker app I'd written for the '85. Click, compile. Click, program via the Dragon's ISP interface. So far so good. (For what it's worth, I had never reached this stage before since the Dragon had always failed to power up with the ATtiny85 cabled up to the ISP interface. Funny what electronics will do when you install stuff backwards.)
Now for debugWIRE... Click, click, click, yeah I'm sure I want to disable ISP and enable debugWIRE. Click... Holy cow! It's running live code on the ATtiny and I'm seeing the contents of its memory LIVE! This ROCKS! I'm a doof, but this rocks! Yeah, so this is just an LED blinker application. But now I can see the ADCs, timers, and everything live!
So with slightly less shaky hands I unplugged the Dragon and thought about this. I can't count how many people on AVRFreaks have reported that they've blown up their Dragons. Among other things, there's a very sensitive part of the on-board power supply that responds poorly to changes in capacitance -- like when a human finger touches it and changes the dielectric constant of its package. So here I am, I've been repeatedly plugging in various AVR chips backwards, and mine still works flawlessly.
Despite all my bad luck with accidents (this is a running joke at work), cards (I simply don't play), life (the water leak at my house), and everything else, maybe I really am a lot luckier than I thought. Or maybe my Dragon just likes me.
It's good to have a Dragon for a friend.
Tom
So on this last project I wound up using the STK500 and the Dragon in concert. The STK500 has two serial ports on it: one to program the device, one that can be attached to the device's onboard UART (if it has one... or more than one.) Problem is my laptop has no serial ports, so I was swapping my USB to serial adapter from one port to the other for programming and testing. It was a drag. In the end I wound up plugging the device's RS-232 port into my Linux box, using VNC on my laptop to connect to the Linux box, and ran it that way. This was better, but it was still a drag.
So this morning I brought in my Dragon, plugged it in as an ISP programmer for the ATmega16 plugged into the STK500, and voila, everything worked perfectly. The laptop's serial cable talks to the device's RS-232 port, and the Dragon acts as a programmer. Perfect.
But wait a sec... How come this only works for off-board targets?! I started to pry. That's when I realized what a doof I've been. After going through the connection diagrams for the ATmega16 (the one I'm using for the Tcl/Tk project), I realized that every time I'd installed a chip on the Dragon, I'd installed it backward. EVERY TIME.
That explained a lot.
So with shaking hands I put in an ATtiny85 (a little 8-pin processor that can crank out 20MIPS with the right crystal plugged in.) With even shakier hands I cabled it up for ISP / debugWIRE. (Since buying the Dragon I have never ever been able to get debugWIRE or JTAG debugging to work because I am a doof.) Click, start AVR Studio. Click, choose the LED blinker app I'd written for the '85. Click, compile. Click, program via the Dragon's ISP interface. So far so good. (For what it's worth, I had never reached this stage before since the Dragon had always failed to power up with the ATtiny85 cabled up to the ISP interface. Funny what electronics will do when you install stuff backwards.)
Now for debugWIRE... Click, click, click, yeah I'm sure I want to disable ISP and enable debugWIRE. Click... Holy cow! It's running live code on the ATtiny and I'm seeing the contents of its memory LIVE! This ROCKS! I'm a doof, but this rocks! Yeah, so this is just an LED blinker application. But now I can see the ADCs, timers, and everything live!
So with slightly less shaky hands I unplugged the Dragon and thought about this. I can't count how many people on AVRFreaks have reported that they've blown up their Dragons. Among other things, there's a very sensitive part of the on-board power supply that responds poorly to changes in capacitance -- like when a human finger touches it and changes the dielectric constant of its package. So here I am, I've been repeatedly plugging in various AVR chips backwards, and mine still works flawlessly.
Despite all my bad luck with accidents (this is a running joke at work), cards (I simply don't play), life (the water leak at my house), and everything else, maybe I really am a lot luckier than I thought. Or maybe my Dragon just likes me.
It's good to have a Dragon for a friend.
Tom
Tuesday, July 10, 2007
Learing a New Language
No, some dogs really can't learn new tricks.
But maybe I'm being too harsh. Here's the deal: I was tasked at work with picking up Tcl/Tk as quickly as possible. I think the phrase "Consider it a learning experience" entered into the conversation at least once. (And to be fair, the speaker was laughing at the time, so they knew exactly what they were saying.)
I decided if I'm going to learn something that can build GUIs, it'd be neat to pick something I want a GUI for. So I stuck an ATmega16 in my STK500 board, plugged the programming serial port into my laptop, the device's serial port into my Linux box, and got to coding.
I admit, at the time I got that sheepish, look-over-the-shoulder feeling of doing something wrong, playing with AVRs at work. This is a hobby, right? Keep the twain separate and all that. In the end, though, it took less than an hour to whip something up on the ATmega16 that would drive the LEDs on the STK500 based on what I got in the serial port, and to dump the status of the eight pushbuttons on the STK500 back out. I hoped it wasn't an hour wasted.
Then began the Tcl/Tk experience...
After fumbling around on my own, I did what I do whenever I learn a new language: I take someone else's code that does something close to what I want, and try to figure out how they did it. Except this particular piece of code wasn't commented, and it wasn't the most transparent beast, either. For starters, Tcl/Tk syntax looks nothing like anything else I've ever used. For another, almost everything they did used the canvas command, which is sort of like saying it used the draw stuff command. Flexible? Yes. Simple? No.
In the end I got the push button stuff working. I can push buttons on the STK500 and see my little circular LED things light up or go dark accordingly. I don't quite have the reverse action working yet. Give me time.
In the end I'd love to have a bank of on-screen LEDs for the pushbuttons, checkboxes that drive the LEDs on the STK500, and I'm bound and determined to make some analog gauges to read the ADCs off the ATmega16 as well. That's about as goofy as I can get and still feel good about it in the morning.
As it is I'm still 100% lost. But I'm commenting this other person's code as I learn what it is they did (and why? maybe...) In the end I hope to have something I can read through that'll finally teach me Tcl/Tk. Aside from some raw X11 programming I did in the late 90's, this is the first real GUI I've ever built.
Ok, maybe you can teach an old dog new tricks. Just hurts a lot.
Tom
But maybe I'm being too harsh. Here's the deal: I was tasked at work with picking up Tcl/Tk as quickly as possible. I think the phrase "Consider it a learning experience" entered into the conversation at least once. (And to be fair, the speaker was laughing at the time, so they knew exactly what they were saying.)
I decided if I'm going to learn something that can build GUIs, it'd be neat to pick something I want a GUI for. So I stuck an ATmega16 in my STK500 board, plugged the programming serial port into my laptop, the device's serial port into my Linux box, and got to coding.
I admit, at the time I got that sheepish, look-over-the-shoulder feeling of doing something wrong, playing with AVRs at work. This is a hobby, right? Keep the twain separate and all that. In the end, though, it took less than an hour to whip something up on the ATmega16 that would drive the LEDs on the STK500 based on what I got in the serial port, and to dump the status of the eight pushbuttons on the STK500 back out. I hoped it wasn't an hour wasted.
Then began the Tcl/Tk experience...
After fumbling around on my own, I did what I do whenever I learn a new language: I take someone else's code that does something close to what I want, and try to figure out how they did it. Except this particular piece of code wasn't commented, and it wasn't the most transparent beast, either. For starters, Tcl/Tk syntax looks nothing like anything else I've ever used. For another, almost everything they did used the canvas command, which is sort of like saying it used the draw stuff command. Flexible? Yes. Simple? No.
In the end I got the push button stuff working. I can push buttons on the STK500 and see my little circular LED things light up or go dark accordingly. I don't quite have the reverse action working yet. Give me time.
In the end I'd love to have a bank of on-screen LEDs for the pushbuttons, checkboxes that drive the LEDs on the STK500, and I'm bound and determined to make some analog gauges to read the ADCs off the ATmega16 as well. That's about as goofy as I can get and still feel good about it in the morning.
As it is I'm still 100% lost. But I'm commenting this other person's code as I learn what it is they did (and why? maybe...) In the end I hope to have something I can read through that'll finally teach me Tcl/Tk. Aside from some raw X11 programming I did in the late 90's, this is the first real GUI I've ever built.
Ok, maybe you can teach an old dog new tricks. Just hurts a lot.
Tom
Sunday, July 8, 2007
Tails & Legs
So I got to try out the kite tails I got for my KAP setup. They're outstanding! I have yet to have one of my parafoils sail that well with so few nosedives. The surprising bit was the kite I had slated to loft the camera probably isn't the one I'll wind up using most of the time. The wind here is tricky, and with wind coming up and over a mountain as well as channeling down a wide valley, we get some oddball gusts and wind tunnel speeds. My little parafoil, the one I don't fly because it's even less stable than my big one, was the clear winner for behavior with the new tails, and it was able to lift a one liter water bottle without too much swaying or scary behavior.
I like the bigger kite for lower winds, though we don't get them that often. Have to keep experimenting.
Anyway, construction continues apace on the KAP rig. Rather than wait a week on the batteries, I'm going to pull out the servo code for the Orangutan and have it send some 1.5ms pulses out of one of its channels so I can center things up for alignment. (Sheepishly... I wrote some library code for driving up to eight servos off a little Orangutan controller, and totally forgot this when it came to centering the KAP's servos! DOH!) In any case this and some longer standoffs should let me finish the rig and get things wired up in anticipation of the new batteries.
Only one problem really remains. After being a little frustrated while working on the KAP rig, and after watching the water bottle tests out in the kite field yesterday, I'm convinced of the necessity of legs on this, my first KAP rig. So I sent another $20 off to Brooks Leffler for a leg kit. I kick myself as I do this, because adding legs would be a really straightforward thing to do in the shop. But dang it, he makes pretty parts that clearly have years of thought and testing put into them, and for $20 I get black anodized leg brackets and carbon fiber legs. I'm not going to knock it. (Besides, my own 0.240" CF spar is slated to be a mast for an RC sailboat I'm working on... I'd have to order more, anyway.)
So still no pictures, but lots more healthy respect for his design work. In any case I got the receipt from All-Battery, and figure the batteries and the legs will ship on Monday. I should have a working rig by next weekend.
Tom
I like the bigger kite for lower winds, though we don't get them that often. Have to keep experimenting.
Anyway, construction continues apace on the KAP rig. Rather than wait a week on the batteries, I'm going to pull out the servo code for the Orangutan and have it send some 1.5ms pulses out of one of its channels so I can center things up for alignment. (Sheepishly... I wrote some library code for driving up to eight servos off a little Orangutan controller, and totally forgot this when it came to centering the KAP's servos! DOH!) In any case this and some longer standoffs should let me finish the rig and get things wired up in anticipation of the new batteries.
Only one problem really remains. After being a little frustrated while working on the KAP rig, and after watching the water bottle tests out in the kite field yesterday, I'm convinced of the necessity of legs on this, my first KAP rig. So I sent another $20 off to Brooks Leffler for a leg kit. I kick myself as I do this, because adding legs would be a really straightforward thing to do in the shop. But dang it, he makes pretty parts that clearly have years of thought and testing put into them, and for $20 I get black anodized leg brackets and carbon fiber legs. I'm not going to knock it. (Besides, my own 0.240" CF spar is slated to be a mast for an RC sailboat I'm working on... I'd have to order more, anyway.)
So still no pictures, but lots more healthy respect for his design work. In any case I got the receipt from All-Battery, and figure the batteries and the legs will ship on Monday. I should have a working rig by next weekend.
Tom
Saturday, July 7, 2007
Batteries, Batteries, and More Batteries
So I got my Brooxes KAP kit home last night and started putting it together. About halfway through it is a step where you modify a servo for continuous 360 degree rotation. No sweat, I've done that four times now, taken pictures, made the web page (got the T-shirt, lost it?) Anyway, easy step. Only catch is you have to make sure you've centered the servo's feedback potentiometer afterward. Easiest way to do this is to plug it into an R/C receiver, power things up, center up the stick on the transmitter, and make sure the servo doesn't keep spinning. So I got out my radio, powered it up aaaaaaandahem... no juice. So I put it on the charger and kept going.
This morning? Still no juice. I opened it up and saw that in the intervening years the battery had done the puffy discharge thing that drives digital doctors nuts. Shame on it! The radio's only... ok, sixteen years old. Twice the age of my oldest kid. >sigh< Can't win.
Actually, yeah I can. Doing robotics gets you into silly things like chopping servos apart to make them spin continuously (which is why I've done that so many times.) But it also gets you into batteries. My favorite battery chemistry, by far, is the lithium chemistries. Both my mini-sumos run on LiPoly batteries, and a friend's much (MUCH) larger project runs on LiIon batteries. Great stuff.
But I was after a direct replacement for the decrepit batteries coming out of my aging radio gear. As luck would have it, though, the same supplier I use for my LiPoly batteries had replacements in-hand! The original was a Futaba NT-8H NiCd pack. All-Battery sells NiMH NT-8H batteries, along with NiMH batteries for the Futaba receiver. Click-click, and now I've got two packs and a charger in the mail.
That may be one of the most rewarding aspects of these hobbies: Taking old "useless" gear and breathing new life into it. Some of the tools in my shop pre-date WW-II. (At least one pre-dates the previous century.) The radio gear for my KAP rig probably wouldn't even pull $20 on Ebay. And yet it's still working (or was the last time I powered it up a year ago), and with new batteries in place it'll help me take aerial photographs anywhere there's wind.
But in the meanwhile, I'm not going to be flying this camera for at least a week. Bummers. Ah well, I've still got some debugging to do on the kite itself. The wind's right, the weather's clear, and I might get a chance to test out the kite tails I got from Brooxes. It'd be nice to know I don't have to worry about nosedives before slinging a camera from the kite line.
Tom
This morning? Still no juice. I opened it up and saw that in the intervening years the battery had done the puffy discharge thing that drives digital doctors nuts. Shame on it! The radio's only... ok, sixteen years old. Twice the age of my oldest kid. >sigh< Can't win.
Actually, yeah I can. Doing robotics gets you into silly things like chopping servos apart to make them spin continuously (which is why I've done that so many times.) But it also gets you into batteries. My favorite battery chemistry, by far, is the lithium chemistries. Both my mini-sumos run on LiPoly batteries, and a friend's much (MUCH) larger project runs on LiIon batteries. Great stuff.
But I was after a direct replacement for the decrepit batteries coming out of my aging radio gear. As luck would have it, though, the same supplier I use for my LiPoly batteries had replacements in-hand! The original was a Futaba NT-8H NiCd pack. All-Battery sells NiMH NT-8H batteries, along with NiMH batteries for the Futaba receiver. Click-click, and now I've got two packs and a charger in the mail.
That may be one of the most rewarding aspects of these hobbies: Taking old "useless" gear and breathing new life into it. Some of the tools in my shop pre-date WW-II. (At least one pre-dates the previous century.) The radio gear for my KAP rig probably wouldn't even pull $20 on Ebay. And yet it's still working (or was the last time I powered it up a year ago), and with new batteries in place it'll help me take aerial photographs anywhere there's wind.
But in the meanwhile, I'm not going to be flying this camera for at least a week. Bummers. Ah well, I've still got some debugging to do on the kite itself. The wind's right, the weather's clear, and I might get a chance to test out the kite tails I got from Brooxes. It'd be nice to know I don't have to worry about nosedives before slinging a camera from the kite line.
Tom
Subscribe to:
Posts (Atom)